
 一、赛题背景
一、赛题背景
随着科技的快速发展,救援技术也正经历着前所未有的变革。特别是在机械自动化和算法领域,其创新成果在救援行业中发挥着越来越重要的作用。救援比赛作为展示和竞赛这些技术的平台,不仅推动了技术的进步,还提高了人们对救援技术的认识和重视。
救援技术是救援比赛的核心内容,涵盖了从灾害现场的快速响应、人员搜救到后续治疗的全方位技术。这其中,自动化设备和算法的应用大大提高了救援的效率和成功率。
机器人自动控制技术和算法设计在救援比赛中占据重要地位。通过优化算法,可以更精确地分析灾害现场的数据预测发展趋势,为救援队伍提供决策支持。此外,机器人自动控制算法设计还能用于优化资源配置、救援路径规划等方面,大大提升救援效率。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以全国组委会文件通知为准。
三、比赛规则
- 省赛
- 机器人自主导航
使用统一的Gazebo世界环境,以及统一的智能车模型,可以通过遥控/自动探索等方式,选取任意一种二维平面或三维空间建图算法,完成对Gazebo中封闭环境的建图。
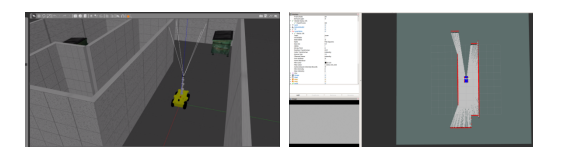
需提供完整代码。需要录制演示视频,视频要求:指定mp4格式,命名为“机器人建图仿真.mp4”,需体现完整的建图过程(取RVIZ中的画面),视频流畅且不得加速。
- 机器人自主导航
同(一),使用统一的Gazebo世界环境,以及统一的智能车模型,在(一)的基础上,使用任意导航算法,智能车从固定起始点A出发,自主导航行驶至固定目标点B,过程中不得与封闭环境边界其途中障碍物发生碰撞。
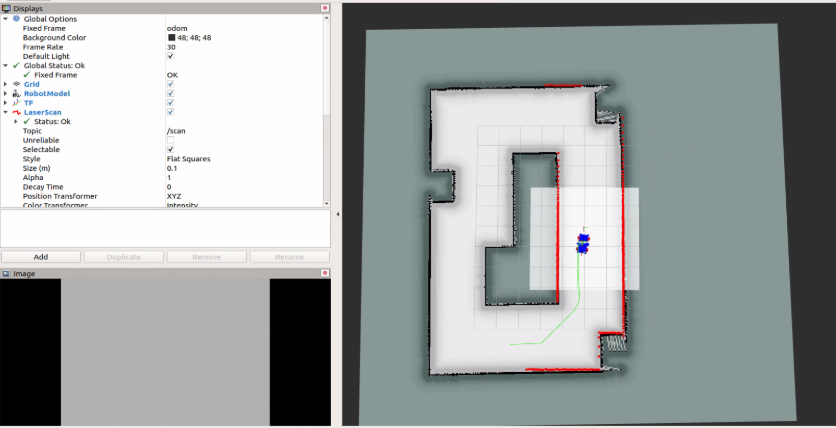
需提供完整代码。需要录制演示视频,视频要求:指定mp4格式,命名为“机器人自主导航仿真.mp4”,需体现完整的自主导航过程(取RVIZ中的画面),视频流畅且不得加速。
- 机器人机械臂抓取仿真
使用统一的Gazebo世界环境,以及统一的智能车模型,在该专门的苹果抓取场景中,检测苹果模型的位置,控制机械臂完成苹果的抓取
需提供完整代码。需要录制演示视频,视频要求:指定mp4格式,命名为“机器人机械臂抓取仿真.mp4”,需体现完整的抓取过程(取Gazebo中的画面),视频流畅且不得加速。
(二)国赛
-
- 参赛(机器人)道具要求
- 参赛机器人需使用经过组委会认证的统一参赛平台.参赛队在此基础上可以进行改装。
- 在满足规则的前提下,可以对机器人的机械和传感器进行扩展,所用的扩展传感器须经赛项负责人认证,或者由用户完全自主自制的传感器,未经组委会认证的,将取消比赛资格。
- 任何一台参加比赛的机器人都必须安全操作,即不对人和环境造成危害。每台机器人都要将电源开关设立在外壳上容易接近的地方。裁判认定参赛机器人有安全隐患,经警示仍不修改的队伍,裁判有权取消参赛资格。
- 机器人应能利用纯视觉自主识别与定位技术,在复杂环境中导航,并通过与本地部署的大模型服务器交互来解析自然语言指令,完成分拣及停车任务。
- 机器人在加装各类传感器或外部结构后的外形轮廓尺寸如下:机械手臂未展开时,长度不大于45厘米、宽度不大于50厘米、高度不大于50厘米。
- 机器人需搭载独立的电源系统、独立的运算平台,机器人要有能够自由移动的底盘,形式包括但不限于麦克纳姆轮、胶轮、足式。
- 机器人若在运行时,可以使用套件箱内提供的设备、传感器等实现相应功能。
- 机器人必须实现自主行驶,不得进行远程操控。除安装必要的传感和处理设备外,不得自行在车体之外设置特殊标识或发射电子信号用于辅助驾驶。
- 对于通过资格评定的车辆,裁判给其粘贴具有唯一性的标识。
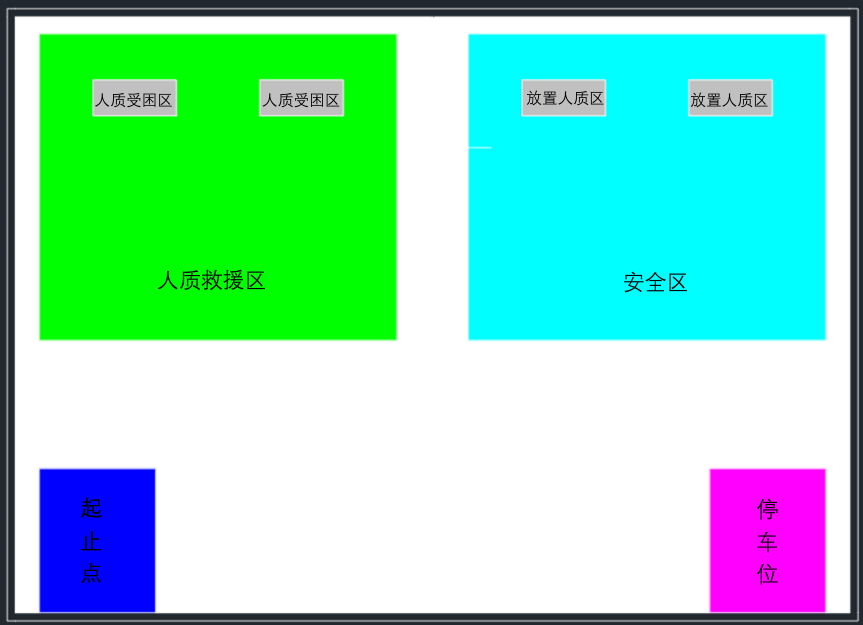
- 比赛场景综述
- 参赛(机器人)道具要求
-
-
- 比赛场地尺寸:3600mm*2600mm;
- 图示深蓝色区域和紫罗兰色分别为救援机器人的起止点和停车位;
- 图示绿色区域和浅蓝色区域分别为人质救援区和安全区;
- 绿色区域里的灰色位置为人质受困区域,蓝色区域里的灰色位置为放置人质位置;
- 场地四周设置有黑色泡沫方砖围栏,高度600mm(单块300*150*150mm,每列4块堆叠),调试时可使用任意高度达到或超过600mm且含竖直立面的物体代替。在每一面围栏内侧竖直立面上特定位置贴有若干200*200mm的AprilTag二维码,用于辅助视觉定位;
- 绿色区域里的灰色位置为人质受困区域,此区域只有救援机器人能够到达。受困人员放置在30cm高的台面上,受困人员以直径36mm,高度75mm的圆柱体代替,会有不同颜色的圆柱体进行干扰。
- 比赛过程
- 检录
-
参赛队伍统一通过抽签进行编号,参赛队按照公布的比赛编号进行排序竞赛,
竞赛前30分钟到达赛项指定地点集合并接受检录。
-
-
- 进场
-
竞赛队伍等候裁判的进场指令,参赛队员按照公布的编号携带竞赛设备进入赛场进行设备安装调试,裁判下一轮指令。未进场的竞赛队伍或选手视为主动放弃比赛资格,竞赛期间其他参赛队不得随意进出赛场。
(3)比赛进行
-
-
- 赛前准备
-
整场比赛分2轮,每只参赛队每轮比赛前有5分钟准备时间,准备好后将机器人放至出发区域并示意裁判比赛,裁判确认比赛开始后,参赛队启动机器人。
(4)正式比赛
通过与本地部署的大模型服务器交互来解析自然语言指令,指的是在用户或企业的私有化环境中(而非依赖云端API),利用本地部署的大型语言模型(LLM)处理人类用自然语言发出的指令,理解其意图并生成相应响应或执行操作。
任务1:裁判员提供随机生成的救援顺序任务指令(2位被救人员的颜色不同),救援机器人通过车载计算机向大模型服务器发送请求并获取执行方案和行驶路径。
任务2:根据大模型服务器提供的执行方案和行驶路径,救援机器人需从起止区出发前往救援区。
任务3:到达救援区后救援机器人通过一定方式分别按裁判员指定顺序运走正确的受困人员(2位被救人员的颜色不同)。
任务4:并将所救援的受困人员分别按指定顺序放置于安全区。
任务5:任务全都完成后,机器人需自动返回车库,并停到起止区。
-
-
- 比赛结束
-
- 裁判宣布比赛开始后机器人30s未开始运动比赛结束。
- 比赛过程中,机器人触碰到障碍物,或者出现卡死、相撞、配合失误等意外情况造成机器人20s内无法自行恢复的和有参赛队员进入场地的,比赛结束。
- 比赛过程中,参赛队员举手示意结束比赛时,比赛结束。
- 比赛过程中裁判组(超过两个裁判)有权根据机器人运行状态停止比赛(例如:机器人程序死机、机器人超过20s状态未发生变化)。
-
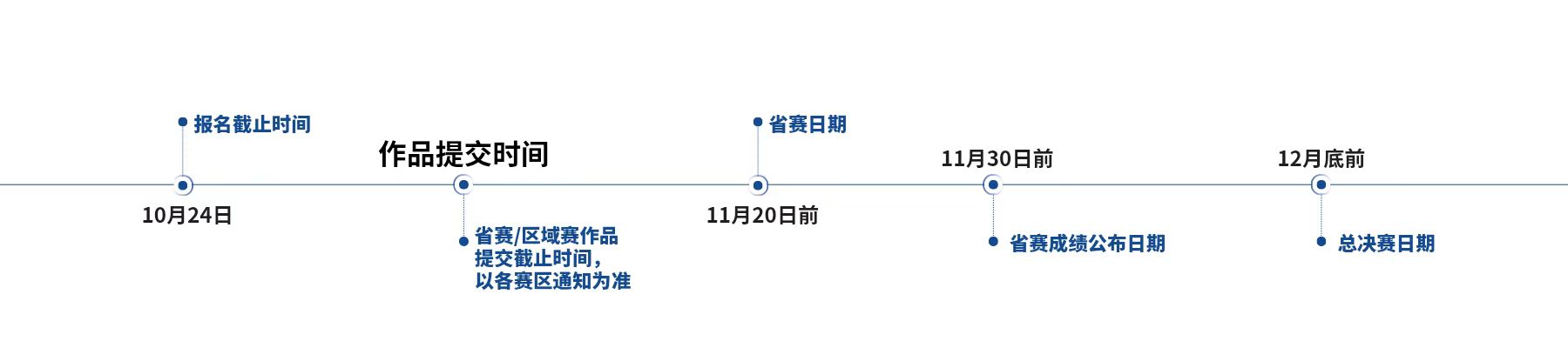
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
(二)作品提交要求
1. 省赛(区域赛、全国初评)
参赛选手务必统一使用百度网盘上传参赛作品,链接中包含:技术文档、源代码(所有)、竞赛任务完成视频、评分表(根据竞赛任务完成度自评)。
具体要求以组委会公布为准。
2. 总决赛
参赛选手务必统一使用百度网盘上传参赛作品,链接中包含:技术文档、源代码(所有)、竞赛任务完成视频、评分表(根据竞赛任务完成度自评)。
具体要求以组委会公布为准。
五、评分规则
表1 省赛评审打分表
| 序号 | 评分项 | 得分 | 备注 |
| 1 | 建图
完成对封闭空间的建图 |
20 | 完全覆盖封闭空间中的区域
栅格地图中若有灰色未探索区域,则视面积大小适当扣分 |
| 2 | 建图效率
完成一次有效建图的时间 |
10 | 限制300秒
剩余时间/300*10 |
| 3 | 导航
完成从A点自动前往B点,且不发生碰撞 |
20 | RVIZ栅格地图中机器人模型接触到黑色边界则认为发送碰撞
碰撞一次扣5分 |
| 4 | 导航效率
从A点出发到达B点的用时 |
10 | 限制300秒
剩余时间/300*10 |
| 5 | 目标检测
是否检测出放置台上的苹果 |
10 | 在相机实时画面中标注出检测结果则得满分 |
| 6 | 机械臂抓取
完成对放置台上的苹果的抓取 |
30 | 控制机械臂抓取物体离开工作台(Gazebo画面)则得满分 |
| 总分 | 100分 | ||
表2 国赛评审打分表
| 序号 | 评分项 | 得分 | 备注 | |
| 1 | 救援机器人成功启动并完全离开起止区 | 3 | ||
| 2 | 顺利到达救援区 | 5 | ||
| 3 | 机械臂正常运行并有抓取动作 | 5 | ||
| 4 | 夹取正确颜色人质 | 10/人*2=20 | 总共抓取人质2次
抓取错误一个人质得扣5分, |
|
| 5 | 救援机器人成功将受困人员(颜色区别)运到安全区 | 10/人*2=20 | 总共安置人质2次
每将一个错误人质运到安全区扣5分. |
|
| 6 | 顺利到达安全区 | 5 | ||
| 7 | 救援机器人返回停车位 | 2 | ||
| 8 | 用时短者为佳,但此项分数必须在机器人完成所有任务的情况下方可计分,其余情况下不得分 | [0-10] | ||
| 9 | 答辩表现 | 10 | ||
| 设计创意 | 20 | |||
| 总分 | 100 | |||
六、其他说明
-
-
- 违规扣分:救援错误将会扣分,扣分值参见评分细则;比赛开始后,参赛者不得操作电脑等设备,不得再触碰参赛设备、场地道具等,否则现场裁判可酌情警告、扣除总分。
- 在比赛时每支队伍有两次比赛机会,取两次中最高分进入最终成绩评审。如果出现2个或2个以上的多队同分现象,通过加赛继续角逐。
- 创意分说明:答辩创意分需由参赛选手上交一份作品说明,简单介绍一下即可。
-
七、联系方式
赛项负责人手机号码:陈老师:18936233133;林老师:18694999139
赛项交流QQ群:707616735
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们