
 一、 赛题背景
一、 赛题背景
聚焦机器人智能控制领域,开展机器人定位、导航、视觉识别、人机交互等相关技术研究,不仅可以锻炼学生的综合创新实践能力,同时有助于提高其智能机器人控制、传感、驱动等各方面技术水平,赛项技术涵盖的专业知识及技能包括:自动控制、单片机编程、数字电路、伺服电机驱动、机器人操作系统、C\C++\Python编程、传感器技术、激光SLAM、深度学习、人机交互等。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)参赛(机器人)要求
参赛机器人需满足附表要求,可以自制,自制平台需在省级比赛(预选赛)报名截止前一周内与赛项负责人确认是否满足参赛要求,没有经过书面确认的机器人不能参赛,也可以咨询赛项负责人使用推荐机器人平台。
| 项 目 | 参数 |
| 人工智能控制器 | 采用英伟达人工智能专用控制器,CPU64位,GPU不低于128核,内存不低于4GB 64-bit 25.6GB/S处理器,储存空间不低于32GB,功耗不大于10W,视频编码不少于2X1080P,视频解码不少于4X1080P,4路3.0USB接口,1路DP接口,一路千兆以太网接口。 |
| 机械臂 | 尺寸:长宽高160mmX140mmX400mm,重量不低于1.1kg,机械爪最大开合尺寸不低于53mm,全金属合金结构表面喷砂氧化处理,具有6个自由度,工作电压12V。UART串口通讯指令传输,最大转动速度不低于1.12sec/60°/ 12V,空载电流500mA.堵转电流12A,控制精度0.2度,带有过载保护,支持参数回传(温度,电压,位置信息等)。 |
| 运动控制器 | ARM Cortex™-M4内核,不低于4路高精度伺服控制,控制分辨率不低于12位,支持位置控制,速度控制,电流控制,各种模式下运动控制参数可调。 |
| 车体结构 | 高强度航空铝合金车体,车身尺寸不低于40*29.5*60cm(长*宽*高),自重不低于6.3kg,负载不低于8kg,最大速度不低于0.5m/s。4路伺服电机配备的里程计分辨率精度不低于1884脉冲/圈。四轮须配备麦克纳姆轮,四轮采用麦克纳姆轮,轮子直径97mm,每轮负载不低于8kg。 |
| 传感系统 | 传感系统:激光雷达,测量范围不小于12m;
九轴姿态传感器(三轴加速度,三轴陀螺仪,三轴磁场); 视觉传感器,分辨率不低于1080p、最高帧率不低于120帧。 |
| 控制器资源 | 控制器资源:蜂鸣器、 4路12V直流电机驱动、9轴IMU传感器、8路D/A信号转换、2路RS-232、1路IIC、2路PWM输出、1路CAN、2路模拟信号输入 |
| 供电方案 | 内置12V动力锂电池组,连续工作时间不低于3小时 |
1. 参赛队赛前需将参赛机器人技术参数发送到下方联系邮箱进行参赛平台认证,经认证后会统一发送认证通过说明文件,通过认证的参赛队才可进入到赛前检录环节。(机器人平台认证方式:将机器人尺寸测量及机器人照片和机器人详细硬件介绍以word的形式统一发送到邮箱即可(需在邮件内容中体现队长及队员姓名,学校,参赛队名称,所报名赛项))
2. 在满足规则的前提下,可以对机器人的机械和传感器进行扩展,所用的扩展传感器须经赛项负责人认证,或者由用户完全自主自制的传感器,未经组委会认证的,将取消比赛资格。
3. 任何一台参加比赛的机器人都必须安全操作,即不对人和环境造成危害。每台机器人都要将电源开关设立在外壳上容易接近的地方。裁判认定参赛机器人有安全隐患,经警示仍不修改的队伍,裁判有权取消参赛资格。
(二)比赛场景综述
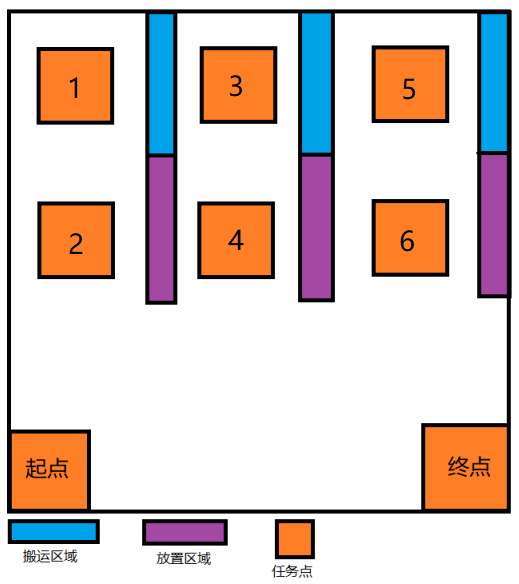
1. 比赛场地为 3.6m*3.6m,场地四周架设高为 30cm 的围栏。
2. 场地设置起点、终点区域各一个,尺寸均为 40cm*40cm。挡板长度为2.4m。
3. 搬运区域和放置区域前有对应的搬运点,机器人需先按顺序完全进入搬运点后进行搬运或放置。搬运点尺寸为40cm*40cm。搬运和放置区域宽度为23cm。
4. 搬运目标:比赛开始前由裁判随机抽取公布。
5. 比赛过程中,所有参赛人员需站在场地围栏外,除紧急处理情况下的裁判员其余所有人员禁止进入正在比赛中的场地。
(三)任务规则与得分标准
(1)到达搬运点1 (5)
(2)抓取到目标物品 (10)
(3)到达搬运点 2 (5)
(4)放置目标物品 (10)
(5)到达搬运点3 (5)
(6)抓取到目标物品 (10)
(7)到达搬运点 4 (5)
(8)放置目标物品 (10)
(9)到达搬运点5 (5)
(10)抓取到目标物品 (10)
(11)到达搬运点 6 (5)
(12)放置目标物品 (10)
(13)到达终点 (10)
(14)技术文档或现场答辩 (10)
注:若提交技术文档,重复率超过50%的队伍,不参与一二等奖评审,若以答辩形式,答辩分不足3分不参与一二等奖评选。
机器人到达任务点或终点,如未完全进入任务点内,裁判根据实际情况酌情给分,在比赛时每支队伍有两次比赛机会,取两次最高分进入最终成绩评审。
如果出现 2 个或 2 个以上的多队同分现象,则根据比赛终止前的比赛用时来确定排名,用时较少的队伍排名靠前。比赛过程中参赛队可以主动要求放弃比赛来获得较短的比赛终止时间。
(四)比赛流程
1. 赛前准备
每只参赛队比赛前有2分钟准备时间,准备好后将机器人放至起点区域并示意裁判比赛,裁判确认比赛开始后,参赛队启动机器人。
2. 比赛过程
机器人进入场地后,需要先到达搬运点,搬运或放置指定目标物品,最后导航到终点区域,完成比赛。
3. 比赛结束
机器人在比赛过程中触碰到围挡或者机器人完全进入“终点”区域,比赛结束。裁判宣布比赛开始后机器人30s未开始运动比赛结束。比赛过程中,机器人触碰到障碍物,比赛结束。比赛过程中,参赛队员举手示意结束比赛时,比赛结束。机器人运行过程中,参赛队员进入场地时,比赛结束。
比赛过程中裁判组(超过两个裁判)有权根据机器人运行状态停止比赛(例如:机器人程序死机、机器人超过30s状态未发生变化)。
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
所有参加队报名前,队长务必加入Q群,如因未加群导致信息发布不对等,后果自负。
省赛和国赛会通过赛前会议发布通知,所有参赛成员需关注B站官方账号:https://b23.tv/4Jl9xwL,我们将在此账号下进行赛前会议直播。
(二)作品提交要求
1. 省赛(区域赛)
关注赛前会议。
2. 总决赛
关注赛前会议。
五、评分规则
评审打分表
| 序号 | 评分项 | 得分 | |
| 1 | 到达搬运点1 (5) | ||
| 2 | 抓取到目标物品(10) | ||
| 3 | 到达搬运点 2(5) | ||
| 4 | 放置目标物品(10) | ||
| 5 | 到达搬运点3(5) | ||
| 6 | 抓取到目标物品(10) | ||
| 7 | 到达搬运点4(5) | ||
| 8 | 放置目标物品(10) | ||
| 9 | 到达搬运点5(5) | ||
| 10 | 抓取到目标物品(10) | ||
| 11 | 到达搬运点6(5) | ||
| 12 | 放置目标物品(10) | ||
| 13 | 到达终点(10) | ||
| 14 | 技术文档或现场答辩(10) | ||
| 时间 | |||
| 总分 | |||
六、其他说明
参赛队伍务必加入下方QQ群。
七、联系方式
赛项负责人:朱老师
手机号码:15966957083
邮 箱:309738513@qq.com
赛项交流QQ群:991452238
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们