
 一、赛题背景
一、赛题背景
随着人工智能与神经科学的深度融合,脑机接口技术正成为人机交互的新兴方向。这类系统通过采集和分析大脑活动信号,运用卷积神经网络(CNN)、循环神经网络(RNN)等AI算法,实现思维与机器的直接沟通。在脑机接口算法竞赛中,参赛者需基于深度学习算法,如Transformer架构,对脑电信号进行特征提取与模式识别,从而掌握脑机接口的基本原理与解码技术,并实际体验通过脑机接口控制外部设备。该赛题不仅帮助学生掌握前沿的人机交互技术,更能培养其在人工智能与神经工程交叉领域,利用强化学习算法优化控制策略的创新能力。
脑机接口(BCI)技术与智能应急处置各种机器人的结合是当前科技领域的一个前沿方向。通过脑机接口技术,人类可以直接用大脑信号控制机器人,而这背后依赖于自适应滤波算法、支持向量机(SVM)等算法,实现复杂任务的精准执行。这种算法技术融合不仅能够提升应急救援的效率和安全性,还能为特殊人群(如瘫痪患者、肢体障碍者)提供更有效的辅助工具。
智能应急处置机器人,基于微处理器和传感器的各种脑控小型应急机器人(应急搬运、智能驾驶、水面打捞等),在模拟区域内通过控制可以自动准确识别危化物体的具体位置、跟踪、避障、自动定位机器人自身精确位置并准确回到起始点。此过程中,YOLO目标检测算法用于危化物体识别,同时SLAM(同步定位与地图构建)算法助力机器人实现室内定位,主要考察智能应急处置机器人的机械系统、电气系统、控制系统、视觉识别、避障系统、室内定位等技术及算法的协同应用。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以全国组委会文件通知为准。
三、比赛规则
参加本比赛的队伍需遵循大赛总规则。
(一)比赛任务场景规则
1. 总体介绍
赛题构成与分值:脑机与应急机器人赛题包含脑机比赛场景任务和应急处置比赛场景任务两部分,两部分得分相加,共同构成参赛队伍总成绩。
任务执行方式:脑机比赛场景任务,需全程通过脑控方式独立完成;应急处置比赛场景任务则由智能自动处置与脑控协作共同完成。
应急处置比赛场景,任务选择:在应急处置比赛场景中,参赛队伍可从“智能应急处置机器人”“视觉应急导航”“漂浮物应急清理”三个细分场景任务中任选其一参赛。
赛制安排:比赛分为省赛和国赛。其中,脑机比赛场景的省赛与国赛任务不同;应急处置比赛场景的省赛与国赛任务一致。
2. 作品提交要求
提交时间与方式:在省赛和国赛开始前,参赛队伍需将技术报告在报名系统中提交,作品提交截止时间另行通知;比赛结束后提交的报告将视为无效。现场任务满分60分,报告分满分40分。
3. 报告内容要求
技术方案设计:需详细说明作品技术细节,包括数据采集、传输过程,以及机器人控制功能实现方式;阐述总体控制思路、技术对比及可行性分析。此外,需重点描述机械臂运动控制算法(如抓取位置识别、力度控制),以及斜坡桥行驶时的平衡控制技术(如姿态传感器应用与动力分配算法)。关键技术实现:针对赛题任务,深入分析关键技术点,完整呈现技术原理、控制模型、算法及代码实现过程。
(二)脑机场景比赛规则
1. 脑机省赛任务规则
参赛者需构建分类算法,对脑电任务数据进行识别分类。具体要求如下:
基于稳态视觉诱发电位(SSVEP)脑机接口实验数据,建立信号特征分类模型;
从给定的N组脑电波数据集中提取每次SSVEP实验的信号片段;
对每个信号片段进行分类识别,判断其对应的视觉诱发任务类别(共8类,编号0-7)
2. 脑机国赛任务规则
场地长宽为3000mm*3000mm,场地主体为迷宫式赛道,由隔断分隔,赛道设置1个入口、1个出口、1个任务触发点(鸣笛1次、闪灯1次)。
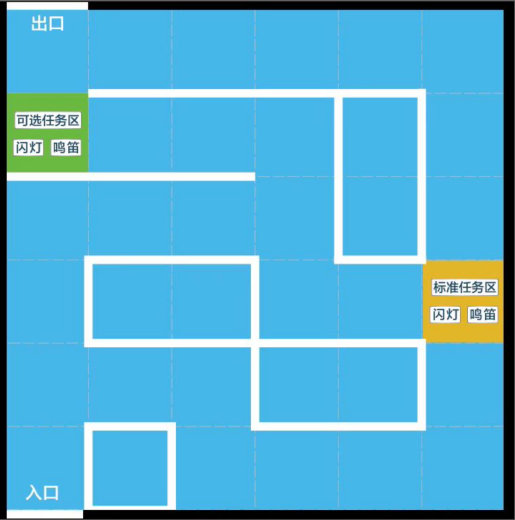
参赛队伍需在脑控智能驾驶场景中完成迷宫任务。该场景由BCI脑电控制系统、智能车、迷宫赛道组成,参赛队伍需通过SSVEP脑控系统实时操控智能车,在规定时间内走出迷宫赛道,最终以完成任务的用时作为判定成绩依据。
(三)智能应急处置场景比赛规则
应急处置比赛省赛与国赛采用统一任务规则、评分规则及评分表,确保赛事公平公正、标准一致。
参赛队伍可从三个细分场景中自主选择其一参赛,明确方向后全力备赛。与脑机比赛全程脑控独立完成任务不同,应急处置比赛任务需智能自动处置与脑控协作完成。其中,在智能自动处置环节,若脑控参与完成一次任务,对应任务分值将按1.2倍计算,以此鼓励脑控技术的深度应用。
细分场景任务说明
1.智能应急处置机器人任务规则
按流程完成任务:从起始点出发→通过单边桥→抓取物品→将物品转移至指定桌子→识别并穿过任意门→识别向左/向右路标完成路径规划(路标位于任意门正前方50cm处)→识别停车位/禁止停车标识→精准停车。
2.视觉导航智能应急处置任务规则
导航路线:从标记点1出发,按1-3-5-6-7-8顺序绕行,共完成2圈。特殊路段要求:遇人行道或红灯需停车3秒,并通过语音或文本提示“人行道前停车礼让行人”;3-4点间随机设置1-2个挡板,需自主避让。
3.漂浮物清理智能应急处置任务规则
机器人从停靠区启动并计时,进入视觉检测区后,自主完成漂浮物识别;随后行驶至清理区,清理指定漂浮物,捕捞操作运送至停靠区域。
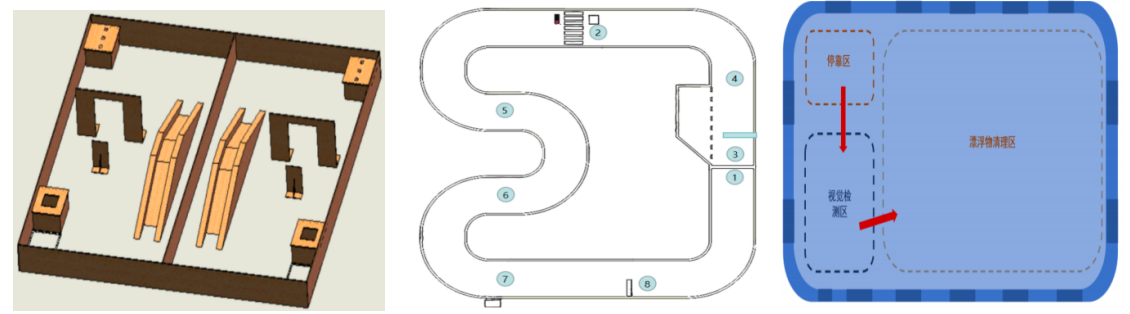
智能应急处置机器人赛道图 视觉导航应急处置赛道 图漂浮物清理赛道图
(四)参赛设备要求
推荐使用赛题建议设备,可联系赛题联系人咨询采购;选择自制设备需符合参数要求,提交详细情况审核,省级赛前2周与赛题联系人确认,未确认不得参赛。
1. 脑机设备参数
脑电放大器:捕捉微伏级脑电信号,支持无线传输。
核心参数:≥8通道,输入阻抗≥1GΩ,参考噪声<1uVpp,采样速率≥500Hz,共模抑制比≥110dB,增益1~24倍。
2. 智能应急处置机器人参数
机械单元:4 个 13kg/cm 扭矩舵机(180° 工作范围)机械臂(底座高≥55mm,大臂≥160mm,小臂≥210mm,金属手抓抓取≥300g);6 个超声传感器融合避障。
运动性能:攀爬≥22°。
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
(二)作品提交要求
1. 省赛(区域赛、全国初评)作品提交
(1)省赛,脑机算法任务提交要求
脑机比赛,省赛场景规则:
参赛者需构建分类算法,识别分类脑电任务数据;本赛题要求参赛团队构建高效脑电信号解码算法,识别稳态视觉诱发电位(SSVEP)脑机接口实验数据。将发布N组脑电波数据,已知这些信号采集自真人进行稳态视觉诱发电位脑机接口实验的脑电信号,视觉诱发任务包含8类(编号为0~7)。实现以下技术目标:
1)针对SSVEP信号特征建立特征分类模型;
2)从数据集中获取每次SSVEP实验的信号片段;
3)对每个实片段进行分类识别,推测该信号片段对应执行的视觉诱发任务。
4)将识别结果记录到赛题提供的标准结果文件中。
数据相关说明:
测试数据集:在备赛阶段,赛题组委会将发布测试数据集。该数据集格式与正式比赛数据完全一致,专门供参赛团队调试算法使用,助力团队优化技术方案。
正式数据集:在比赛正式开始前4小时,赛题组委会将在指定QQ群(群号:100628255)以百度网盘链接的形式发布正式数据集。参赛团队需及时关注群消息,自行下载数据集用于比赛。
结果存储规范:参赛团队需将识别结果妥善保存至百度网盘。网盘文件目录必须包含学校名称、队伍名称、队伍编号、队长姓名及联系电话等完整参赛队伍信息,确保信息准确可查。
结果提交方式说明:参赛团队需将百度网盘链接通过邮箱发送至719972971@qq.com和792724945@qq.com并在报名系统中提交作品,若组委会指定其他邮箱,则需同步提交。邮件主题应与网盘文件目录保持一致,完整呈现参赛队伍信息,以便组委会准确接收和识别结果。现场算法满分60分,报告分满分40分。
(2)省赛,应急处置场景,技术报告提交要求
参赛队伍需将技术报告在报名系统中提交,作品提交截止时间另行通知,比赛正式结束后提交报告视为无效作品。现场任务满分60分,报告分满分40分,技术报告无统一模板要求,参赛队伍可根据内容自主编排格式,提交要求如下:
技术方案设计:梳理作品技术,详述数据采集、传输及机器人控制功能实现。内容涵盖总体控制思路、技术对比、可行性分析。
技术方案:阐述机械臂运动控制算法,包括抓取位置识别、力度控制等精准抓取技术;说明斜坡桥行驶时平衡控制技术,如姿态传感器应用与动力分配算法。
关键技术实现思路:针对赛题任务,分析关键技术点,详细描述技术原理、控制模型、算法及代码实现。
2. 总决赛作品提交
总决赛作品提交要求
参赛队伍需将技术报告在报名系统中提交,作品提交截止时间另行通知,比赛正式结束后提交的报告,将被视为无效作品,不予评审。
应急处置场景任务,即便在省赛阶段已提交过技术报告,参加国赛之前,仍需按照上述要求重新提交技术报告。
五、评分规则
(一)评分规则总述
任务执行方式
脑机比赛场景任务:全程需通过脑控方式独立完成。应急处置比赛场景任务则由智能自动处置与脑控协作共同完成。
总成绩构成
总成绩由两部分组成:现场任务分,占总成绩的60%。技术报告分,占总成绩的40%。
现场任务分计算
包含脑机比赛场景任务和应急处置比赛场景任务,每项任务满分都是60分。
技术报告分计算
技术报告分,由脑机比赛场景和应急处置比赛场景,两份技术报告分组成。内容涵盖技术方案、实施过程、成果分析等,评审根据报告的完整性、创新性、可行性打分,每份满分40,打分后计入成绩。
最终成绩
现场任务分与技术报告分相加,即为最终总成绩。
举例:上述现场任务分51分加上技术报告分36分,最终总成绩为51+36=87分。
(二)脑机任务场景评分规则
脑机任务场景的省赛与国赛采用不同评分规则:省赛依据脑机算法任务,完成任务情况评分,国赛则根据脑控智能车,迷宫任务的完成评分。省赛和国赛分别对应独立的任务规则及评分表。
1. 省赛时,脑机赛道算法任务规则及评分
数据集发布:备赛期发布测试数据集(格式与正式赛一致),供参赛队伍提前熟悉与调试。赛前4小时于QQ群(群号:100628255)发布正式加密数据集压缩包,参赛队伍可提前下载。待比赛T0时刻,组委会将在同一QQ群公布解压缩密码,届时方可对数据集进行解密使用
时间节点:
T0-4h:发布加密数据集
T0:开放解密密钥
T0+4h:截止结果提交
省赛时,脑机算法评分标准:
识别正确率ACC=((识别正确的任务数量)/总任务数量)×100
参赛者可多次通过同一网盘文件目录,提交识别结果,以最后提交的结果为准。计算参赛者提交的识别结果的识别正确率。以正确率高者排名靠前。正确率相同的参赛者提交时间更早的排名靠前。
2. 国赛时,脑机赛道任务规则与评分
国赛时,参赛队伍需通过BCI脑机控制系统,操控智能小车,依次完成任务:先将小车行驶至迷宫赛道指定位置(标准任务区),完成鸣笛1次、闪灯1次操作;随后驶向迷宫出口,完成模拟智能驾驶场景竞赛。
可选任务区规则
可选任务区是否开放,由组委会根据参赛队数量、场地条件及赛程安排等因素综合评估确定。
若开放,满足以下条件可执行可选任务用于加分:小车在驶入可选任务区出口前,最后一格实际行驶用时(不含已获加分及扣分项)超过6分钟的队伍,可于出口前最后一格掉头,在可选任务区内再次完成鸣笛、闪灯各1次。此项设置旨在为落后队伍提供追回分值的机会。
需注意,实际行驶用时未超过6分钟的队伍,无参与可选任务的资格。
国赛时,脑机机赛道评分标准
比赛选手完成脑控智能驾驶所有竞赛任务总用时,比赛用时间越短,排名越靠前。现场任务分满分60分,报告分满分40分。
附:国赛现场,脑机评分表
| 脑控智能驾驶任务评分表 | ||||||
| 队伍编号: 队伍名称: 学校名称: | ||||||
| 项目 | 鸣笛任务完成 | 闪灯任务完成 | 小车复位/指令错误次数 | |||
| 触发数量(个) | ||||||
| 实际用时 | 闪灯/鸣笛奖励时间 | 惩罚时间:复位/指令错误 | 比赛总用时: | |||
| 裁判: | 赛后,须队长签字后,方可离场;签字: | |||||
| 规则说明:
1. 选手通过脑机控制小车:前进、后退、左转、右转、鸣笛、闪灯任务完成穿越迷宫任务,控制越精准,完赛时间越短。 任务区奖励:完成鸣笛和闪灯,各奖励1分钟。 |
||||||
| 2. 比赛计时规则:脑控车比赛起步前,车前轮须置于入口起步边界外。参赛队长申请开始后,裁判启动计时,车辆完全越过终点站时计时结束。 | ||||||
| 3. 脑机赛题,场地任务分计算公式:
现场任务分=(标准时间-参赛队伍总用时(分钟))÷100×60 标准时间:取值范围为60-100分钟,根据比赛现场实际运行情况,统一执行。 举例:标准时间省赛通常用100分钟,参赛队伍总用时15分钟;技术报告得分:38分 现场任务分:(100-15)÷100×60=85÷100×60=51分 脑机赛题总分值=场地任务分(51分)+技术报告分(38分)=89分 |
||||||
| 4. 分值计算规则
-基础计分:以指令正确率为主要考核指标。比赛中,小车出现跑偏、擦边或转弯角度偏差等情况,可扶正调整,不扣分; -出现指令错误:(如:参赛队员发出“向前”指令,小车实际执行为,非向前动作)每次扣10秒,同一位置错误不累计扣分; -因指令错误致使小车横跨跑道或边线后,每次扣20秒,同一位置不重复扣分。 |
||||||
| 5. 任务区加分规则
-标准任务区规则 参赛队伍需操控脑控车完全驶入标准任务区后,方可执行“闪灯”“鸣笛”两项任务。每项任务仅允许执行1次,成功完成后,比赛总用时可分别减少1分钟。未完全进入任务区即执行任务或重复操作均不予计分。 -可选任务区规则 可选任务区是否开放,将由组委会根据参赛队伍数量、场地实际条件等因素综合评估后现场决定。若开放: 参与条件:脑控车在驶入可选任务区出口前,若到达最后一格实际行驶用时(不含已获加分及扣分项)超过6分钟,可在出口前最后一格选择掉头,执行加分任务。 任务区域:组委会将提前明确可选任务区具体位置(例如:迷宫区最后一格车辆掉头180度后,前方12点钟方向、距离终点边线第二方格区域)。 加分标准:在可选任务区内成功完成“闪灯”或“鸣笛”操作,每项额外奖励1分钟。 总用时限制:计入所有奖励后,,若总用时低于5分钟,则统一按5分钟计入最终评分表。 |
||||||
| 6. 特殊情况处理:当比赛过程中小车因特殊原因出现无法控制的情况,参赛者可要求裁判将小车复位至赛道入口继续比赛,每次复位比赛用时增加1分钟,最多可复位2次。 | ||||||
| 7. 脑机代码二次开发,成绩判定规则:
运行要求:比赛期间,参赛选手使用标准脑机软件与小车,完成迷宫任务。默认以标准配置运行,确保比赛公平性。代码及算法调整规则:不建议调整,具备开发与算法调试能力的选手,可自行微调代码和算法。赛题支持单位仅提供标准产品培训服务,不提供代码调整协助,以及调整后的开发测试、运维支持。 代码调整范围:仅限脑控闪烁持续和间隔时间;小车驾驶速度、指令间隔、移动距离等参数,超出此范围视为违规。 控制方式限定:比赛全程必须紧扣脑机控制主题,自比赛开始后,迷宫地图中仅允许使用脑电方式控制小车。严禁使用自动执行程序、固定路线自动运行,以及手柄、手机遥控等脑机控制以外任何方式操控小车完成迷宫任务,违反将取消成绩。 违规处理:若出现任何违规操作,该参赛队伍的比赛成绩将被判定为无效,且不接受申诉。现场比赛以裁判判罚为准。 |
||||||
| 8. 总分构成:比赛总成绩由现场任务分(满分60分)与报告分(满分40分)组成。技术报告需在参赛前提交至719972971@qq.com、792724945@qq.com;并在报名系统中同步提交,若组委会指定其他邮箱,则需同步提交。文件统一命名为*“赛题+学校名称+作品编号+队伍名称+技术报告”*,格式为PDF。未按要求提交,报告分计0分。 | ||||||
(三)智能应急处置场景任务评分规则
- 省赛规则与国赛规则
智能应急处置场景,省赛与国赛采用统一任务规则、评分规则及评分表,确保赛事公平公正、标准一致。
- 细分场景任务说明
参赛队伍可从三个细分场景中自主选择其一参赛,明确方向后全力备赛。与脑机比赛全程脑控独立完成任务不同,应急处置比赛任务需智能处置与脑控协作完成。其中,在智能自动处置环节,若脑控参与完成一次任务,对应任务分值将按1.2倍计算,以鼓励脑控技术深度应用。应急处置比赛场景,任务选择:在应急处置比赛场景中,参赛队伍可从“智能应急处置机器人”“视觉应急导航”“漂浮物应急清理”三个细分场景任务中任选其一参赛。分别如下:
(1)智能应急处置机器人场景任务规则和评分
从起始点出发→精确行驶通过单边桥→准确抓取物品→将物品转移到指定桌子上→自主识别任意门并穿过→再识别向左或向右的路标完成自主路径规划(路标的固定支架位置为正对任意门中间位置,距离任意门50cm)→识别停车位标识或禁止停车标识→准确将车停在停车位,为完整过程。
| 智能应急处置机器人任务挑战赛评分表 | ||||||||
| 队伍编号: 队伍名称: 学校名称: | ||||||||
| 编号 | 任务 | 分值 | 说明 | 分项说明 | 用时 | 分值 | 得分 | 合计 |
| 1 | 双边桥坡道 | 10 | 顺利通过单/双边桥 | 顺利完成,且没有出现掉落现象 | +10 | |||
| 通过时掉落一次 | +5 | |||||||
| 掉落两次及以上 | 0 | |||||||
| 2 | 定位抓取 | 10 | 按要求定位准确并能准确抓取物体 | 其他传感器进行定位 | +2 | |||
| 图像识别定位 | +7 | |||||||
| 准确抓牢物体 | +3 | |||||||
| 3 | 抓取物体颜色 | 9 | 三球并排,赛前约定某色球分值最高,放左或右侧;另一侧球分值次之;中间球分值最低(难度最低) | 赛前约定颜色球(左或后侧) | +9 | |||
| 赛前约定颜色球外,另一侧球 | +6 | |||||||
| 中间球 | +3 | |||||||
| 4 | 自动避障(穿过任意门) | 7 | 障碍通道任意门可随机摆放位置为距离墙550cm-750cm区域内摆放 | 顺利通过障碍通道(穿过任意门) |
|
+7 |
|
|
| 5 | 识别向左或向右路标: | 7 | 机器人能自动识别到向左或向右路标并顺利按照所示方向旋转移动,识别后错误方向前进,不得分。 | +7 | ||||
| 6 | 物品放置 | 5 | 按要求定位准确并能放置物体到指定区域 | 放在指定的区域内 | +5 | |||
| 7 | 识别到停车位和禁停车标识 | 7 | 机器人能自动识别到停车位或禁止停车标识并顺利按照所示方向移动 | +7 | ||||
| 8 | 回到停车位 | 5 | 机器人回到指定350*400mm区域 | 完全回到基地 | +5 | |||
| 垂直投影未完全在基地内(未在基地超过15%) | 0 | |||||||
| 9 | 接触墙体或障碍物 | 比赛过程中接触墙体或障碍物 | 第一次 | -3 | ||||
| 第二次 | -3 | |||||||
| 第三次(最多扣3次) | -3 | |||||||
| 用时 | 在分数相同,耗时最短者获胜。 | 技术报告分: | 现场分数: | |||||
| 注 | 合计分值:现场分值()+技术报告分()= | |||||||
| 裁判员签字: | 参赛队伍签字: | 场地考试用时: | ||||||
(2)视觉导航应急处置场景任务规则和评分
1)导航路线与任务流程
导航路线:从标记点1出发,按1-3-5-6-7-8绕行,需完成2圈。
任务流程:选手于停靠区准备,准备好后开向检测区,朝向清理区就绪,清理区中志愿者投掷好目标物,计时开始后,,小船依次执行识别计数、自主捕捞任务。
2)特殊路段要求
人行道:遇人行道或红灯,停3秒,停车时需语音/文本显示“人行道前停车礼让行人”。
挡板区:3-4点间随机1-2个挡板,需自主避让。
3)各路段评分标准
3-4/7-8避障:每撞击障碍物1次,罚10秒。
4-2红绿灯:红灯需停车,未停罚10秒;压/超停车线,额外罚10秒。
红绿灯后播报:需语音/文本显示“人行横道前停车礼让”,未执行罚10秒。
全路段压线:单轮压线/越界罚5秒;持续超5秒、冲出赛道、中途停止或受人为干预判定零分
完成时间(两圈)对应分值:
1-3名:60分、57分、55分
4-10名:51分、48分、45分、41分、38分、34分、31分
11-20名:29分、27分、26分、24分、22分、21分、19分、17分、15分、14分
21-30名:13分、12分、11分、10分、9分、8分、7分、6分、5分、4分
30名后:3分。
| 队伍编号 | 轮次 | 压线次数 | 障碍物撞击次数 | 未遵守红绿灯次数 | 压斑马线次数 | 未播报次数 | 冲出赛道次数 | 完圈用时 | 最终用时 | 竞速得分 | 技术报告得分 | 总分 (满分100) |
视觉导航应急处置场景评分表
视觉导航应急处置场景总成绩构成
总成绩由两部分组成:现场任务场景得分按上述评分标准计算后,总分60分;技术报告得分按40%比例折合,折合后总分40分;两部分得分相加,合计为100分。
(3)漂浮物清理应急处置场景任务规则和评分
机器人于停靠区准备,启动后开始计时。
比赛任务:参赛队伍需在6分钟内,完成对四类漂浮物的自动捕捞任务。
漂浮物种类及分值
白色乒乓球:共3个,每个5分,总计15分
黄色乒乓球:共5个,每个4分,总计20分
塑料瓶子:共5个,每个3分,总计15分
可乐罐子:共5个,每个2分,总计10分
本场景任务满分60分,各类漂浮物分值设定依据:颜色越浅、体积越小的物体识别难度越高,对应分值相对较高。
比赛流程:
机器人于停靠区准备,启动后开始计时
自主完成漂浮物识别与捕捞操作
在6分钟计时结束后,比赛自动终止。
评分规则:
得分计算:以实际成功捕捞的漂浮物数量,按对应分值累加计算总分
成绩判定:最终得分最高者获胜;得分相同情况下,用时更短的队伍排名靠前
有效捕捞标准:漂浮物被机器人成功捕获并搬运至指定区域,视为有效捕捞
技术报告分(40分)
含文本(技术方案、算法设计、测试分析、作品总结)与主要源码,裁判组根据格式及内容完整性评分。
| 作品编号 | 团队名称 | 白球得分 | 黄球得分 | 塑料瓶得分 | 可乐罐得分 | 时间 | 比赛得分 | 技术报告 | 裁判2 | 裁判3 | 技术报告得分 | 总分 | 排名 |
评委签字: 队长签字:
六、联系方式
赛题负责人手机号码:13012913283;18243460217邮箱:719972971@qq.com;792724945@qq.com
赛题交流QQ群:100628255
所有参加脑控与智能应急处置机器人赛题,报名前,队长务必加入群,如因未加群导致信息发布不对等后果自负。
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们