
 一、赛题背景
一、赛题背景
本赛项以智能视觉算法应用为背景,参赛选手在设备、场地等限制条件下,利用开放式控制平台实现视觉检测技术以及自动化控制技术,选择合理的算法策略,设计高效的识别方案,完成对物品的外观识别标定和仓储管理,从而实现物品的高效管理。
该赛项的实施可助力学生掌握算法逻辑编程的技能,涵盖专业知识及技能包括目标检测与识别、人机交互、自动化控制等。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)设备介绍
- 硬件平台
本设备平台由三轴抓取系统、视觉检测系统、仓储货架、控制系统等组成。在开放的控制平台实现对不同缺陷物料的标定识别、智能存储,配合数字化的信息管理平台,实现物料存储应用场景的智能化。设备硬件整体长宽1000x500mm。如图1、2所示。
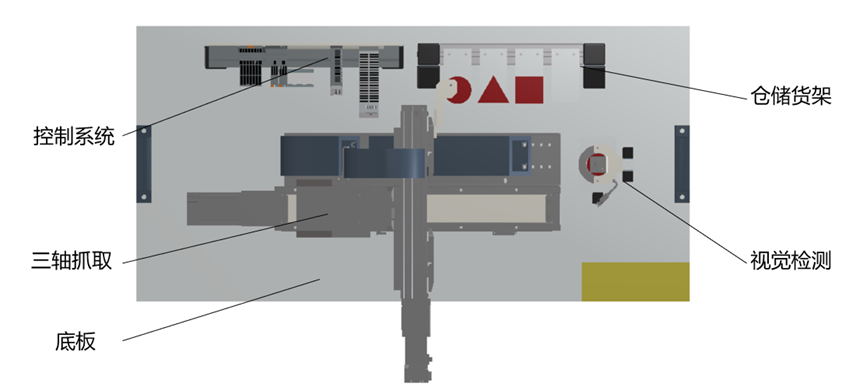
图1 设备俯视图
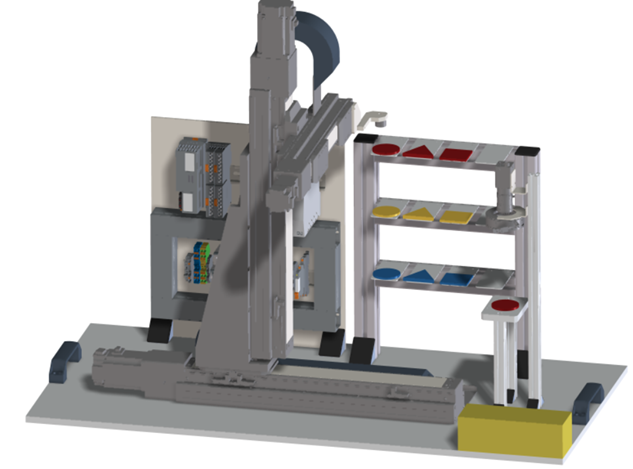
图2 设备整体示意图
1) 三轴抓取系统
三轴抓取系统由三轴伺服机构和电磁吸盘组成,主要功能是将视觉检测区的物料吸取放置到仓储货架指定位置。
- X/Y/Z轴行程:≥300mm/200mm/300mm
- 电机功率X/Y/Z轴:≥200w/100w/200w
- 最高速度:不小于200mm/s
- 负载:≥0.5kg。
- 伺服驱动参数要求:额定输出功率X轴Z轴为2kw,Y轴为0.1kw,电压等级200V,PROFINET总线通讯。23位绝对值编码器,3000rpm,有小容量、高转速、低惯量的特点。
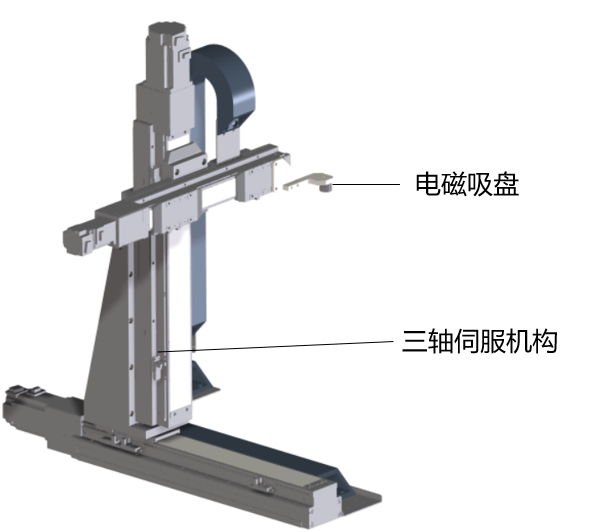
图3 三轴抓取系统示意图
2) 视觉检测系统
本系统不允许携带光源等其他辅助设备。
视觉检测系统由视觉检测相机、置物平台组成,主要功能是检测置物平台上物料的缺陷种类。
视觉传感器:≥40万像素;
规格:CMOS全局快门,彩色;
功能:高速,高性能;
有效像素720*540;数字I/O: 6-pin P7接头提供供电和I/O:1 路光耦隔离输入(Line0),1 路光耦隔离 输出(Line1),1 路双向可配置非隔离I/O(Line2)。
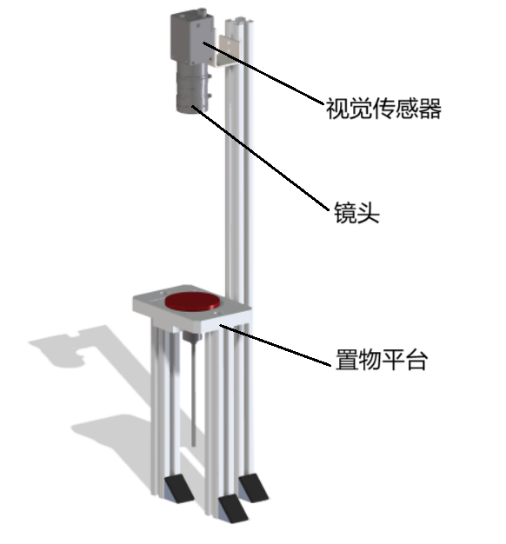
图4 视觉检测系统示意图
3) 仓储货架
仓储货架由铝型材和铝塑板搭建而成,用于放置识别后的物料。
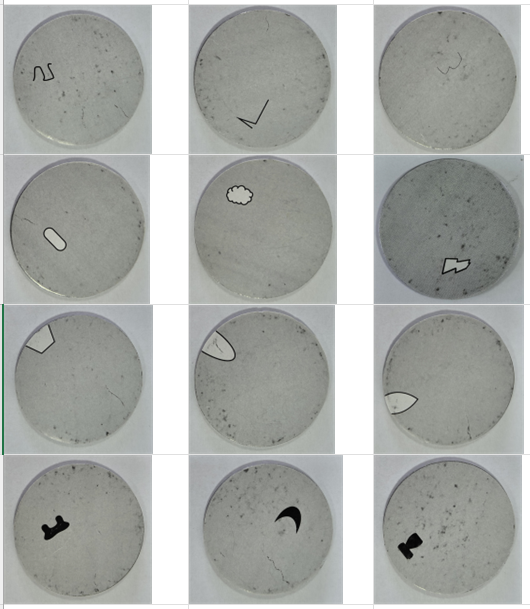
仓储货架包含12个库位,每个库位长宽高尺寸:50mm/70mm/110mm。检测物料为圆形铁片。圆形铁片的缺陷种类分划痕、污渍、缺角、孔洞等多种缺陷类别,划痕长短、污渍形状、缺角大小、孔洞大小数量随机。
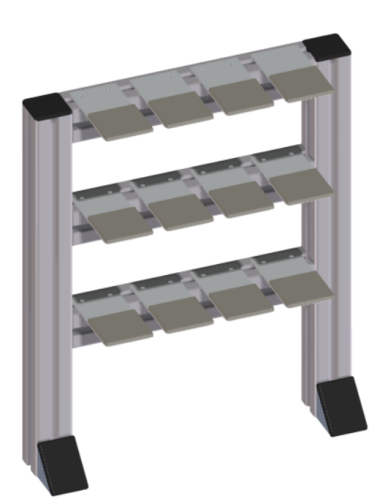
图5 仓储货架示意图
- 控制方案
控制系统组成:由一台控制器独立控制。
操作系统要求:Linux(调试用电脑禁用联想拯救者系列)
控制器参数要求:边缘控制器,同时支持IEC61131-3、MATLAB Simulink、C++、C#、Java、Python等,适用于协议转换、数据采集和云计算。通过DisplayPort本地输出可视化内容,支持多种协议,例如:http、https、FTP、SNTP、SNMP、SMTP、SQL、MySQL、DCP等,两个独立的以太网接口和WIFI,一致的图形编程接口。
本设备平台通过智能算法处理视觉相机拍摄的不同物料,发送给控制器,控制三轴伺服模组将物料抓取到对应的仓储货架上。
宏观上看,在整个系统中,上位机(工程师站)、控制器、远程IO、伺服及视觉相机之间采用网线连接。其中控制器、远程IO、伺服采用PROFINET协议通讯,视觉相机采用TCP协议通讯。整体网络拓扑结构如图6所示。
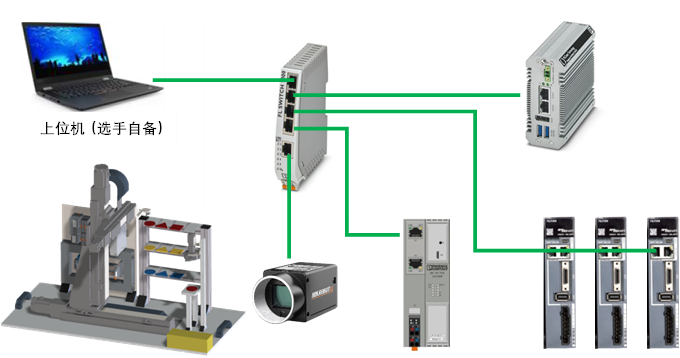
图6 网络连接拓扑
- 软件平台
1) PLC控制软件介绍
本设备需要使用PLC编程软件,用于开发基于控制器的自动化解决方案,编程软件覆盖开发和调试自动化应用程序所需的全部应用,结合了硬件组态、参数配置,满足IEC 61131-3 编程、可视化和诊断所需的所有基本功能。此外,该软件还可实现将高级语言代码植入到PLC程序中。
2) 视觉平台介绍
视觉检测平台硬件为边缘控制器,视觉软件基于Python完成物料缺陷种类的视觉检测(传统检测、深度学习),每种缺陷对应一种结果变量,并开发程序完成视觉检测结果与PLC的通讯和信号交互,同时PLC程序控制视觉检测程序启停,也可在HMI界面显示视觉检测结果,软件部分基于Podman完成部署。
(二)比赛场景综述
- 硬件简述
本算法平台底板尺寸为1000x500mm,建议放置在750mm左右高度工作台上进行操作。1-3人操作。
- 工作流程
- 通电,导入PLC程序;
- 调试程序;
- 人工将比赛物料按照赛题顺序放置到置物平台;
- 视觉传感器进行拍照识别;
- 三轴系统吸取物料进行搬运;
- 电磁吸盘将搬运的物料放置到仓储货架上指定位置。
- 重复上述3-6条动作流程,直到所有物料放置完成。
(三)评分点及评分标准
- 赛程要求
1) 检录
比赛前,由组委会安排抽签,决定出赛场次;
赛场的赛位统一编制赛位号,参赛队按照公布的竞赛场次,竞赛前15分钟到达赛项指定地点集合并接受检录;
检录后抽取当场比赛赛位号。
- 进场
按照场次顺序,参赛队员依次进入对应的赛位,等待裁判下一轮指令。
- 安装与调试
裁判现场抽题,等待裁判指令,统一计时30min。
检查并连接各设备,竞赛队伍需要按照赛题要求进行伺服输送系统点位调整、物料视觉识别程序编写和参数调试、程序下载和系统联调等软硬件调试工作。计时一到,裁判宣布停止调试,各竞赛队伍应立即结束调试工作,等待裁判下一轮指示。如提前结束安装调试工作请举手示意,裁判记录安装调试时间。
- 竞赛
设备调试结束后,竞赛队伍等待裁判的竞赛指令。
由参赛队员派一名代表做算法介绍,时长不超过5分钟。
介绍完毕后,由裁判统一计时5分钟,比赛按照赛位顺序进行。裁判将被检测物料恢复赛题所示初始顺序并摆放到待分拣区域,经选手检查无异议后,宣布竞赛开始后计时开始。选手启动设备,人工上料,由系统自动完成竞赛物料的识别和分拣。
- 如遇设备故障,参赛选手可举手示意,申请重启系统,次数不超过两次,以系统运行最佳结果为准计分。
- 要求系统采用视觉识别的方式进行自主识别,禁止比赛进行期间使用任何通讯设备干预系统运行;
- 要求系统程序在竞赛前部署调试完毕,禁止在比赛过程中改写程序。必要时,可举手向裁判申请,得到裁判许可后,进行系统的重启检查。
- 计分
裁判宣布竞赛结束后组织现场打分,以竞赛时间内系统有效运行结果为准,总分100分,由算法展示与答辩、安装与调试、竞赛结果三部分组成总成绩作为评分标准。选手对打分结果无异议后签名确认。
以下为评分要点:
根据物料分类识别的结果进行评分,物料到机器视觉识别区域,依次实现物料分类识别,并使用三轴抓取系统将识别后的物料放在指定位置,按分类识别正确数量计分;
根据完成竞赛的时间进行评分。在竞赛的5分钟内,从裁判宣布竞赛开始到裁判宣布竞赛结束的计时为队伍的实际竞赛完成时间,完成时间越短分数越高。
若竞赛时间相同,根据调试和安装时间计分,调试和安装时间越短得分越高。
- 离场
计分完成后,参赛队伍须在10分钟内,断开通信线材,整理竞赛设备,在裁判的安排下有序离开赛场。
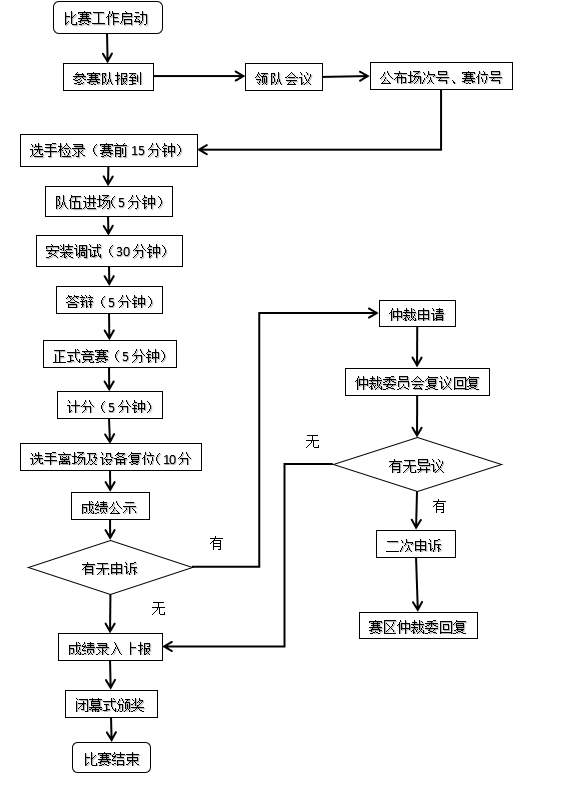
- 竞赛流程图
- 任务要求
任务流程
首先物料(按照赛题所示顺序)到达视觉识别区域,利用工业相机对物料拍照,开发传统视觉算法或者深度学习视觉算法进行不同缺陷类别的分类,根据当前仓储状态及类别综合分析,由三轴机构将物块放置到不同的区域。参赛团队运行视觉检测程序和PLC程序,启动设备,将指定类别缺陷的物料放入指定区域。
物料图(示例)
- 安装调试
任务时间:30min
任务要求:
- 设备完整性检查,硬件检查,线缆连接检查;
- 设备通电检查,进行I/Ocheck,保证设备初始状态正常;
- 调节合适的光圈和焦距,便于清晰成像(提前安装海康MVS)。
- 通信测试,使PC和设备各模块通讯正常连接;
- 设备程序下载与运行;
- 调试Python视觉识别程序(传统检测、深度学习),基于Podman,能在PLC中正确运行程序;
- 视觉算法与PLC成功通讯,信号交互正常;
- 伺服控制程序的调试与正常运行;
- 设备整体运行连贯和完整。
- 竞赛
答辩时间:5min
由参赛队伍派一名代表做算法介绍,介绍程序的设计逻辑、采用算法的种类,通讯框架及方式。
任务时间:5min
赛前,由裁判根据竞赛任务书指定内容,在待分拣区域摆放竞赛物料。物料口每次只能按赛题所示顺序取出一个物料,由选手每次取一个放在指定区域。
设备开始自动运行视觉检测算法并由三轴系统搬运到指定仓位。选手根据竞赛任务书完成指定数量的物料检测和存储,裁判根据设备视觉检测的准确性和运行速度来评分。
任务要求:
- 启动设备,选手取出一个物料(按照赛题所示顺序),放在指定视觉检测区域;
- 在机器视觉识别区域,实现物料类别的种类识别;
- 三轴抓取机构根据种类识别结果,将物料摆放到相应区域;
- 根据竞赛任务书描述的分拣数量和指定位置,循环完成上述任务。
- 评分细则
公开赛项评分标准和评分方式,赛项最终得分按百分制计分。成绩评定必须在公开、公平、公正、独立、透明的条件下进行。
参照人工智能、视觉算法、自动化集成相关行业企业规范,赛项总成绩满分为100分,以项目完成度和效率相结合的选择制定评分标准,根据参赛队伍完成竞赛任务的情况,按照评分标准进行现场评分。分数分布如下:
- 算法展示与答辩20分;
- 安装与调试5分;
- 竞赛结果75分;
裁判宣布竞赛结束后,组织现场打分,以竞赛时间内系统有效运行结果为准,总分100分,由算法展示与答辩、安装与调试、竞赛部分组成评分标准,以上三部分得分相加得到的总得分作为名次排序依据。选手对打分结果无异议后签名确认。
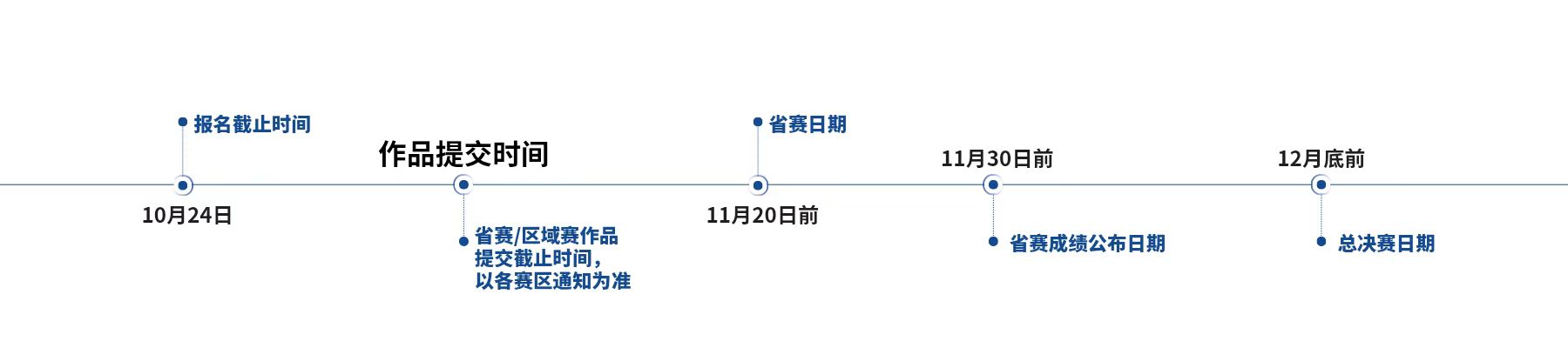
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
(二)作品提交要求
- 省赛(区域赛)
参考省赛比赛规则(线上)。
- 总决赛
根据现场赛题要求完成比赛任务并示意裁判进行评审;
比赛结束后需将代码源码、实际运行的docker容器镜像文件、技术实施方案文档提交邮箱:1023196461@qq.com。
五、评分规则
表评审打分表
| 序号 | 评分项 | 评分细则 | 得分 | |
| 1 | 算法展示与答辩 | 介绍程序的设计逻辑、采用算法的种类,通讯框架及方式。
思路清晰,结构合理,算法明确(11-15分) 思路一般,结构模糊或答辩不合理(0-10分) |
20分 | |
| 采用深度学习算法(5分) | ||||
| 2 | 安装与调试 | 视觉部分调节,图像成像清晰且视野合适。(5分) | 5分 | |
| 3 | 竞赛结果 | 在epc1502控制器的docker容器中部署视觉算法及程序,脱机成功运行。(15分) | 75分 | |
| 正确放置12个物料,每个物料4分,总分48分。 | ||||
| 脱机竞赛完成时间≤3分钟,得12分(12个物料全部正确后计分) | ||||
| 总 分 | 100分 | |||
六、联系方式
赛项负责人手机号码:15188699298
邮 箱:zhaoxinyi@phoenixcontact.com.cn
赛项交流QQ群:925652844
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们