 一、赛题背景
一、赛题背景
随着科技的不断发展,机器人技术也取得了长足的进步。机器人穿越火线比赛正是基于这一背景而产生的。穿越火线比赛是一个结合了机器人自动控制、计算机视觉技术、人工智能技术等的竞技项目。
这个比赛旨在促进机器人技术、计算机视觉技术和人工智能领域的发展,同时也为参赛者提供一个展示自己才华和技能的舞台。计算机视觉技术在穿越火线比赛中扮演着重要的角色。参赛者需要设计和优化计算机算法,以实现高校的机器人控制和定位。高校作为人才培养和科技创新的重要基地,通过组织和参加类似的比赛,可以激发学生的创新精神和团队合作精神,同时也为高校之间的学术交流和技术切磋提供了一个平台。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)省赛
1. 机器人底盘仿真
参赛选手需要在gazebo仿真环境下搭建机器人底盘模型,并在rviz中进行显示雷达、IMU数据情况。需录制演示视频,视频为MP4格式,视频要求:按照题目序列号命名(如机器人底盘仿真视频-1),体现代码内容,编程演示运行过程,视频流畅。
2. 机器人建图仿真
参赛选手需要在gazebo仿真环境中搭建墙壁、障碍物模型,并使用Gmapping建图、Hector建图和Karto建图三种建图算法控制机器人完成建图,建图完毕后保存地图。需录制演示视频,视频为MP4格式,视频要求:按照题目序列号命名(如机器人建图仿真视频-2),体现代码内容,编程演示运行过程,视频流畅。
3. 机器人自主导航仿真
参赛选手可以任选一种建图算法,进行机器人自主导航,要求在RVIZ中设定一个目标点,机器人从起始点出发前往目标点。起始点和目标点参赛选手可以自行设置。需录制演示视频,视频为MP4格式,视频要求:按照题目序列号命名(如机器人自主导航仿真视频-3),体现代码内容,编程演示运行过程,视频流畅。
(二)国赛
参赛队需使用组委会认证的移动机器人设备,参赛队在此基础上可以进行改装。为了保证参赛设备能在场地上正常运行,且能顺利完成比赛,只有符合以下条件,通过参赛资格测试认证的设备方能参加比赛,具体参赛设备要求如下:
1. 机器人
- 机器人需搭载独立的电源系统、独立的运算平台,机器人要有能够自由移动的底盘,形式包括但不限于麦克纳姆轮、胶轮、足式。
- 机器人需使用套件箱内提供的设备、传感器等实现相应功能。
- 机器人可以自主行驶,也可进行远程操控。除安装必要的传感和处理设备外,不得自行在车体之外设置特殊标识或发射电子信号用于辅助驾驶。
- 机器人若为人为操作,必须以第一人称视角远程操作。
- 参加比赛的机器人必须使用比赛现场提供的激光打靶设备进行打靶。
- 机器人结构件必须为自主设计打印的3D打印件拼搭,所有连接必须采用机械结构连接方式实现,不可采用胶水粘接等其他连接方式。
- 机器人只能是陆地行驶类的机器人,不可用无人机等其他形式的机器人参赛。
- 过资格评定的移动机器人,裁判给其粘贴具有唯一性的标识。
2. 参赛者(若为远程操控需遵照此项规定)
- 比赛过程中只能由一人完成机器人的所有动作操作;
- 机器人操作者在随机坐标生成前,须背朝比赛场地于指定地点远程操作机器人,且操作视角为第一人称视角。具体操作地点根据赛场实际情况而定。
3. 比赛场景综述
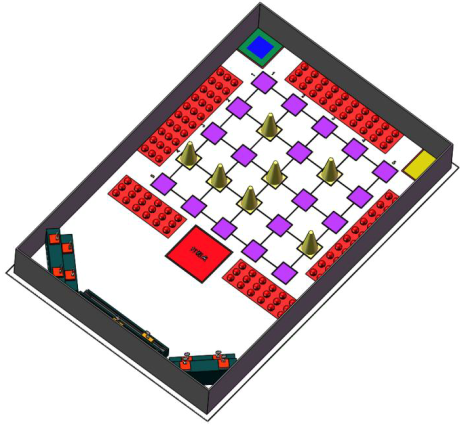
比赛场地轴测图
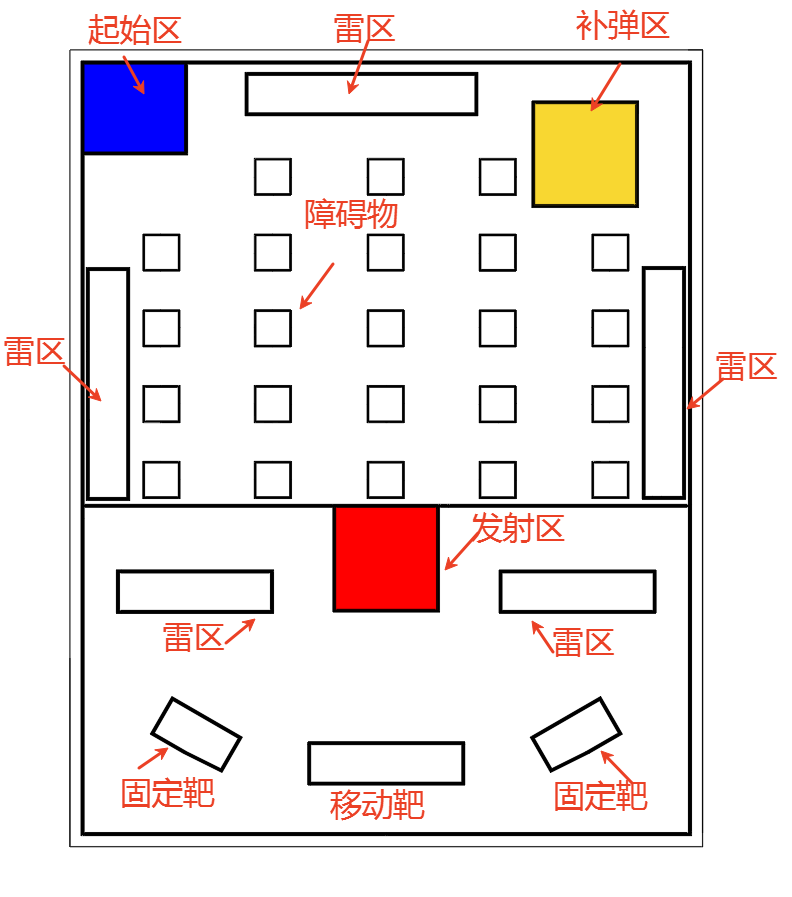
比赛场地地图
- 场地尺寸:3m*2.5m,周围架设高为60cm的围栏;
- 场地材质:喷绘布;
- 场地设置起止点、弹药库各一个,尺寸为25cm*25cm;
- 场地设置打靶点一个,尺寸为35cm*35cm;
- 场地设置5*5障碍物随机坐标阵列区域一个,紫色格子区域为障碍物放置区域;
- 场地设置“雷区”5个,其为禁止碰触及禁入区域;
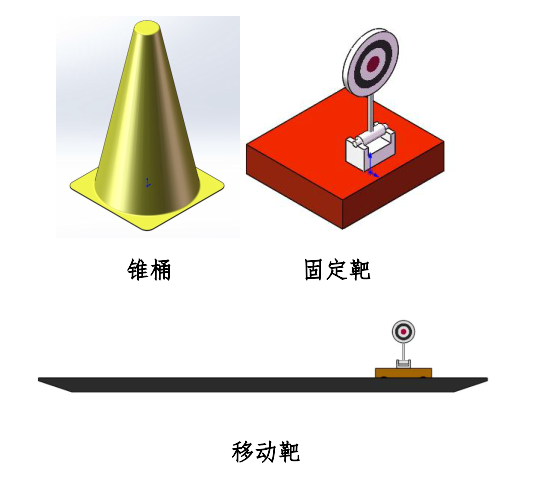
- 场地中设置障碍物(锥桶)6个,其摆放位置坐标由计算机随机生成;
- 场地设置固定靶2个,移动靶1个;
- 场地制作:由支持单位统一制作或自行按图纸打印;
- 比赛过程中,所有参赛人员需站在场地围栏外,除紧急处理情况下的裁判员其余所有人员禁止进入正在比赛中的场地。
4. 比赛过程
(1)赛前准备
比赛开始前裁判由电脑生成一组随机坐标,然后裁判根据坐标摆放障碍物(锥桶)位置。每个参赛队伍在机器人进入启动区后,该队伍的设备组装、调试及2轮比赛时间共30分钟(暂定,以现场安排为准),期间每轮比赛开始时间以参赛队伍与现场裁判示意为准。(若第一轮提前结束,剩余时间可转加至该队第二轮调试时间)。
(2)正式比赛
- 每轮比赛开始前,参赛队伍须与现场裁判沟通确认是自动还是手动操作,比赛共计2轮,以取得的最高分计,且2轮比赛之间可变更操作方式,需提前向裁判报备。
- 比赛开始时,机器人从起止点出发,运行到达打靶点。
- 机器人在打靶点执行打靶任务,对靶区靶子进行射击进行积分,靶子容量为10发,打完取弹药补充点进行补弹。
- 机器人运行到达弹药补充点(弹药库),补充弹药时需要机器人完全进入弹药补充区,参赛队员方可按动加弹按钮,给机器人补充弹药。
- 比赛时间到时机器人需最终回到起止点,机器人完全停止在起止点视为完成任务(未完全停止在起点,给予一定的扣分处罚)。
- 在比赛时每支队伍有两次比赛机会,取两次最高分进入最终成绩评审。
- 若存在队伍最终分数一致,安排加赛。
(3)比赛结束
- 机器人行进过程中每触碰1次障碍物,给予1次扣分处罚,满5次本轮比赛结束。
- 图示红色区域为雷区,机器人不可踏入此区域,一经踏入,立即终止比赛。
- 机器人在比赛过程中触碰到围挡,10s内无法恢复,比赛结束。
- 裁判宣布比赛开始后机器人30s未开始运动比赛结束。
- 比赛过程中,参赛队员举手示意结束比赛时,比赛结束。
- 机器人运行过程中,参赛队员进入场地时,比赛结束。
- 比赛过程中裁判组(超过两个裁判)有权根据机器人运行状态停止比赛(例如:机器人程序死机、机器人超过20s状态未发生变化)。
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
(二)作品提交要求
1. 省赛(区域赛、全国初评)
参赛选手务必统一使用百度网盘上传参赛作品,链接中包含:技术文档、源代码(所有)、竞赛任务完成视频、评分表(根据竞赛任务完成度自评)。
具体要求以组委会公布为准。
2. 总决赛
参赛选手务必统一使用百度网盘上传参赛作品,链接中包含:技术文档、源代码(所有)、竞赛任务完成视频、评分表(根据竞赛任务完成度自评)。
具体要求以组委会公布为准。
五、评分规则
表1 省赛评审打分表
| 序号 | 评分项 | 得分 | |
| 1 | 底盘模型构建 | 10 | |
| 2 | 雷达/IMU数据 | 10 | |
| 3 | Gmapping建图 | 10 | |
| 4 | Hector建图 | 10 | |
| 5 | Karto建图 | 10 | |
| 6 | 成功从起始点前往目标点 | 50 | |
| 总分 | 100分 | ||
表2 国赛评审打分表
| 序号 | 评分项 | 得分 | 备注 | |
| 1 | 机器人成功启动 | 3 | 机器人完全离开起止区 | |
| 2 | 机器人成功到达激活点 | 5/10 | 此项分数只计算一次
(手动控制5分) (自动控制10分) |
|
| 3 | 累计击倒固定目标次数 | α*1/3 | α为累计击倒靶子次数
(手动打靶1分/次) (自动打靶3分/次) |
|
| 3 | 累计击倒移动目标次数 | β*3/6 | β为累计击倒靶子次数(手动打靶3分/次)
(自动打靶6分/次) |
|
| 4 | 机器人到达充能区成功充能 | 10/20 | 此项分数只计算一次
(手动控制10分) (自动控制20分) |
|
| 5 | 完全返回起止点 | 5/10 | 完全进入起止区;压线得2分
(手动控制5分) (自动控制10分) |
|
| 6 | 答辩创意 | 10 | ||
| 拼搭创意 | 10 | |||
| 7 | 机器人行进过程碰到障碍 | -2*γ | γ为次数(-2分/次)
累计5次比赛结束 |
|
| 总分 | 180分 | |||
六、其他说明
- 省赛分数说明:穿越火线仿真评分占总分60%,技术文档占40%;
- 国赛中选手击倒的靶子越多得分就越高;
- 国赛创意分说明:因机器人由学生自主设计并打印的3D打印部件拼搭,对于性能、外观等有创意部分均可得分,创意分由裁判给出,取平均。
七、联系方式
赛项负责人手机号码:陈老师 18936233133;林老师 18694999139
赛项交流QQ群:526032366
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们