 一、赛题背景
一、赛题背景
大模型技术创新赛是以人工智能前沿技术为核心驱动的综合性竞赛,聚焦大模型技术的突破性应用与生态构建,旨在激发高校团队挖掘大模型在自然语言处理、多模态交互、知识推理等领域的创新潜力。比赛不仅为技术人才提供展示与交流平台,更致力于打通产学研用链条,加速大模型技术从实验室研究向产业赋能的转化进程,助力数字经济时代智能化升级。
月球仓储基地是深空探测后勤革命的关键一环,其建设需融合航天工程、材料科学、人工智能等多领域技术,不仅服务于短期探月任务,更将为人类迈向深空殖民奠定基础。未来随着月球资源开发技术成熟,仓储基地将从物资仓库升级为月球经济枢纽,推动太空探索从单次任务向持续驻留跨越。大模型技术的快速发展为仓储基地作业提供了智能化解决方案,能够优化货物分拣效率并提升资源利用率。为推动大模型技术在月球仓储基地的创新应用,本赛题以仓储基地分拣及搬运为主题,参赛选手需基于指定设备设计一套智能作业系统,结合大模型、计算机视觉、导航、机械臂抓取技术,解决货物识别与导航、精准抓取与放置等核心问题。本赛项旨在激发参赛选手的创新能力,推动月球仓储基地物流技术与可持续发展的融合。

二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以全国组委会文件通知为准。
三、比赛规则
参赛队伍使用规定的比赛平台结合大模型、ROS2机器人操作系统、视觉技术等主流技术,开发一套目标识别到作业执行的智能系统。
比赛开始后,选手使用控制器,基于大模型和计算机视觉技术,识别仓储中的目标货物,并生成位置信息;利用移动机器人与机械臂,通过控制器规划最优路径到达目标区域,避开障碍物;执行货物抓取、搬运与放置动作,将目标物拾取后放置于指定区域,并通过大模型生成语音或文本实时播报作业状态。参赛队伍需根据提供的仿真环境与控制器接口,设计算法方案并实现功能。
规则如下:
(一)参赛(作业设备)道具要求
参赛作业设备需使用规定控制器,具体参赛平台要求如下:
1. 仿真环境
(1) 比赛使用仿真平台,控制器预装ROS2,提供标准化移动机器人与6自由度机械臂模型。
(2) 仿真场景为室内场景,默认含A、B、C三个放置区域、若干个目标货物,其余场景内容自行设计。
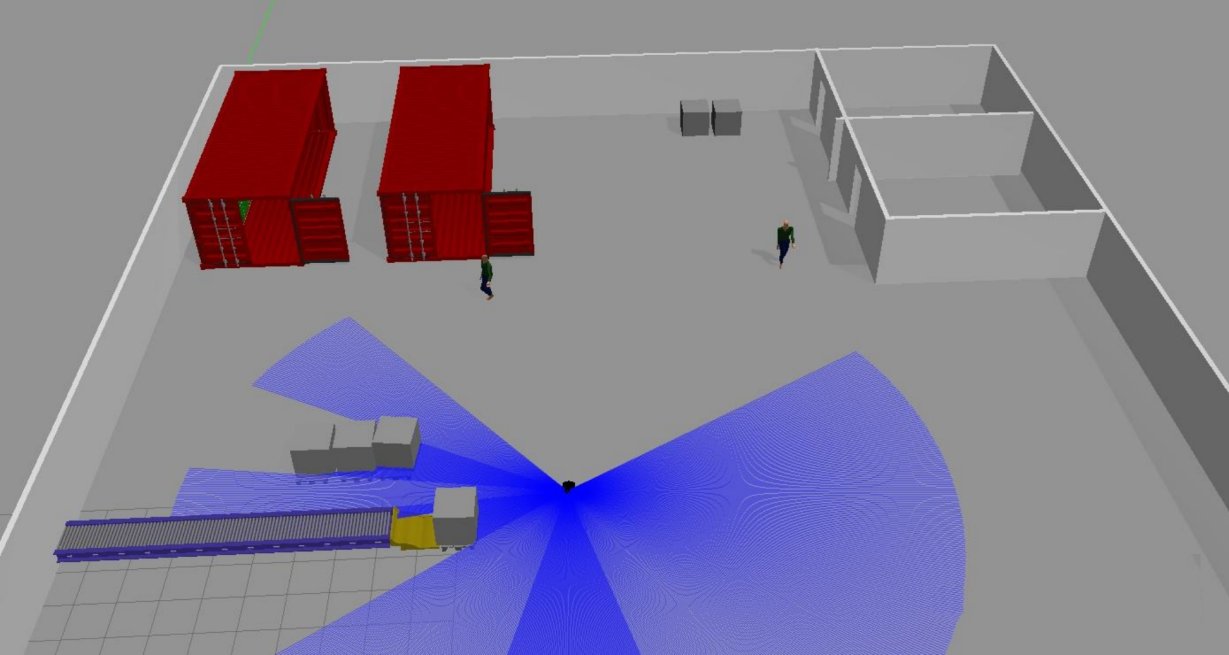
仿真场景示意图
(3) 提供目标货物为红色和蓝色立方体包裹模型。
2. 评分系统
平台:使用Foxglove Studio,运行于控制器,订阅参赛队伍发布的标准化ROS2 topics,实时可视化比赛数据。
选手设计要求:参赛队伍需设计Foxglove自定义布局,包含以下可视化 widgets 以辅助裁判评分:
1)指令解析显示:显示当前任务指令(如抓取红色包裹)。
2)目标识别:显示目标货物位置与颜色。
3)导航路径:显示移动机器人实时路径。
4)抓取状态:显示机械臂抓取与放置结果(成功或失败,目标位置)。
5)状态反馈:显示作业状态文本(如已抓取蓝色包裹)。
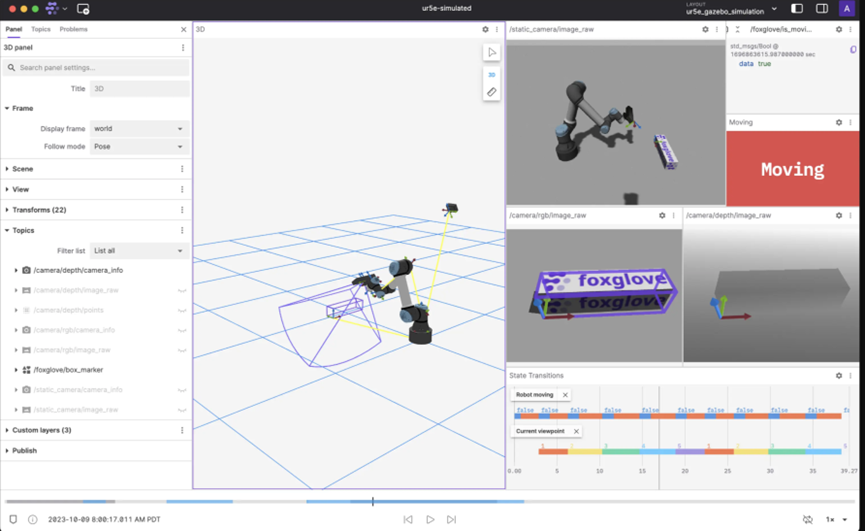
FoxGlove画面
- 参赛者
- 每队1-3人,比赛全程由参赛者操作并提交代码、调试仿真环境与Foxglove布局。
- 操作视角为第一人称(同时显示FoxGlove和仿真界面)。
操作视角示意图
(二)比赛流程
1. 赛前准备
比赛开始后,参赛队伍启动Foxglove和仿真环境,正式进入比赛流程。
2. 比赛过程
比赛仅1轮,限时5分钟。
- 裁判发布搬运物体颜色与放置区域任务(如:搬运2个红色包裹到A区,3个蓝色包裹至C区)。
- 参赛队伍与裁判申请比赛开始;
- 开始计时,同时启动机器人作业;
- 比赛过程中,机器人通过SLAM、大模型与视觉系统等技术,发布任务、识别目标并规划路径,完成抓取、搬运和放置任务;
- 机器人完成抓取、搬运和放置任务,同时需要将机器人工作状态实时显示到FoxGlove中。
3. 比赛结束
(1)比赛过程中,参赛队员举手示意结束,则比赛结束;若时间截止,比赛自动结束。
(2)比赛结束,选手确认成绩后离场。
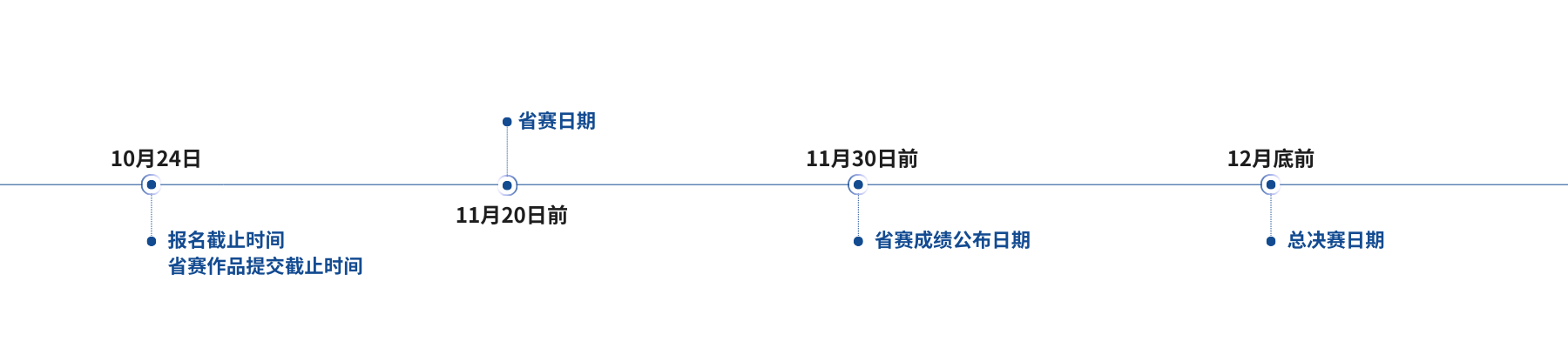
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
(二)作品提交要求
- 省赛(区域赛、全国初评)
参赛选手统一使用百度网盘上传参赛作品,参赛队伍需按照要求提交技术文档、算法源码、竞赛任务完成视频。
以组委会公布为准。
2. 总决赛
参赛选手统一使用百度网盘上传参赛作品,参赛队伍需按照要求提交技术文档、算法源码、竞赛任务完成视频。
以组委会公布为准。
五、评分规则
比赛时长为5分钟,以各项任务得分之后为最终得分。计分规则如下:
评审打分表
| 序号 | 评分项 | 得分 | 备注 |
| 1 | 系统启动,机器人与场景完全成功加载并显示在仿真环境中(10分) | 机器人与场景完全加载得分,未加载完全不得分。 | |
| 2 | 指令解析,成功发布大模型指令并将指令解析到FoxGlove中显示(10分) | 正确将指令解析显示到FoxGlove中即得分,解析错误或未成功解析不得分。 | |
| 3 | 货物抓取,机械臂成功抓取到货物(20分) | 每抓取到一个货物得4分,总分为20分。 | |
| 4 | 货物搬运放置,成功抓取目标并放置于指定区域(20分) | 每成功到一个货物得4分,总分为20分。 | |
| 5 | 机器人避障,机器人成功完成场景中对可移动物体的避障(10分) | 每增加1个移动物体并成功实现避障得5分,总分为10分。 | |
| 6 | 状态反馈,成功在FoxGlove中显示路径规划轨迹、机械臂抓取状态、每一轮任务完成情况(10分) | 每次完成状态有效反馈即得分,否则
不得分。 |
|
| 7 | 场景设计分,构建复杂地形并对机器人完成任务增加复杂度(10分) | 根据场景中复杂度评分。 | |
| 8 | 技术文档(20分) | 考察参赛选手算法的创新性、逻辑性。 | |
| 总分 | |||
六、联系方式
赛项负责人手机号码:夏老师 17786393126
赛项交流QQ群:169391662
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们