 一、赛题背景
一、赛题背景
随着海洋资源开发和水下作业需求的增长,水下机器人技术已成为科研和工程应用的重要方向。本次水下打捞任务对抗赛旨在模拟真实的水下作业环境,考验参赛队伍在机器人控制、目标识别及团队协作等方面的综合能力。比赛不仅考察机器人的运动控制、抓取精度和稳定性,还涉及战术策略和实时应变能力,为参赛者提供实战化的竞技平台。
高校及科研机构通过参与此类比赛,可促进水下机器人技术的创新,推动智能控制、计算机视觉、水下通信等领域的交叉融合,为未来水下作业机器人发展培养人才。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以全国组委会文件通知为准。
三、比赛规则
参赛队伍需设计并制作两台符合比赛要求的水下打捞机器人。
比赛开始前,裁判将在水下场地中分别放置5个球,双方阵营分别选取一种颜色的球。比赛时间为2分钟,比赛开始后,机器人从起点出发,通过机器人夹取己方颜色的球获取分数,分数高者获胜。若一方夹完己方全部5个球,可继续夹取对手夹回的球。比赛过程中,机器人需高效完成任务,同时避免与对手机器人发生冲突。
(一) 参赛(机器人)道具要求
参赛设备需使用经过组委会认证的统一参赛平台,参赛队在此基础上可以进行改装。为了保证参赛设备能在场地上正常运行,且能顺利完成比赛,只有符合以下条件,通过参赛资格测试认证的设备方能参加比赛,具体参赛设备要求如下:
- 水下打捞机器人
- 机器人必须基于组委会认证的统一平台进行改装,机器人本体尺寸(不包括机械夹爪)不得超过300mm(长)×250mm(宽)×250mm(高)。水下部分结构需采用防水设计,外壳鼓励使用3D打印等轻量化方案,外观设计可自由发挥,但不得影响机器人的运动性能。
- 机器人需搭载独立电源、水下夹取装置,具备水下自主移动能力,推进形式不限。
- 抓取机构可使用机械夹爪、吸附装置等,但需通过安全测试(无尖锐部件、防缠绕设计), 禁止使用商业成品(如工业机械手)。
- 机器人可选用有缆(ROV)或无缆(AUV)两种控制方式。无缆(AUV)可采用浮标/天线通信。
- 操作者可以采用全局视角操作,也可以通过机器人回传的实时视频操控。
- 机器人只能是水下机器人,不可用无人机等其他形式的机器人参赛。
- 视觉与通信装置
- 视觉模块(可选)可集成于机器人本体,检测方式不限(如摄像头、激光等)。成功安装并使用实时图像回传的队伍可获得额外加分。
- 禁止使用任何形式的主动干扰设备(如声呐干扰、电磁干扰等)。
(二) 竞赛方式
- 竞赛形式
线下赛,统计竞赛队的总成绩进行排序。
- 竞赛队伍组成
不得跨校组队,每个学校可多只队伍参赛,每队需配有1名指导老师,指导教师须为本校专兼职教师。
- 选手应为学校全日制在籍学生。
- 参赛选手年龄不限,每支参赛队由2-3名比赛选手组成,选手须为同校在籍学生,其中队长1名。选手需分工协作,共同完成竞赛任务,具体分工由各参赛队自主决定。
(三) 赛前准备
- 场地布置:比赛开始前由裁判随机布置目标球位置(红/蓝各5个),参赛队伍可观察但不得触碰。
- 设备调试:每支参赛队伍在机器人放入各自投放区后,可获得5分钟设备调试时间。调试期间可测试机器人移动、抓取功能,但不得干扰场地布置。
- 最终确认:每轮比赛开始前,参赛队伍需向裁判明确操作方式(有缆/无缆遥控)。
注:裁判检查机器人电源、通信状态后,方可开始比赛。
(四) 比赛过程
- 比赛采用双队对抗模式,每队操控两台机器人,裁判鸣哨宣布比赛开始,比赛时长为2分钟。
- 比赛开始时,机器人从各自投放区出发,遥控夹取己方颜色球。每成功夹取1个己方球并放入投放区框子内得11分。
- 若己方球全部夹取完毕,可继续夹取对手已夹取的球(每个得3分)。
- 比赛时间到时,裁判鸣哨终止比赛。比赛过程中允许合理干扰(如阻挡路径),但禁止直接碰撞对手机器人。
(五) 比赛结束
- 时间到达2分钟时,比赛自动终止。
- 出现同分时,夺取对方球多者排名靠前,出现同分并夺取对方球相同时故意碰撞次数少者排名靠前。
- 出现以下情况时,裁判可提前终止比赛:
机器人卡死或失控超过10秒;
参赛队员违规干预;
裁判组(超过两人)判定出现异常情况。
注:比赛全程需遵守规则,最终解释权归赛事裁判组所有。
- 比赛场景综述
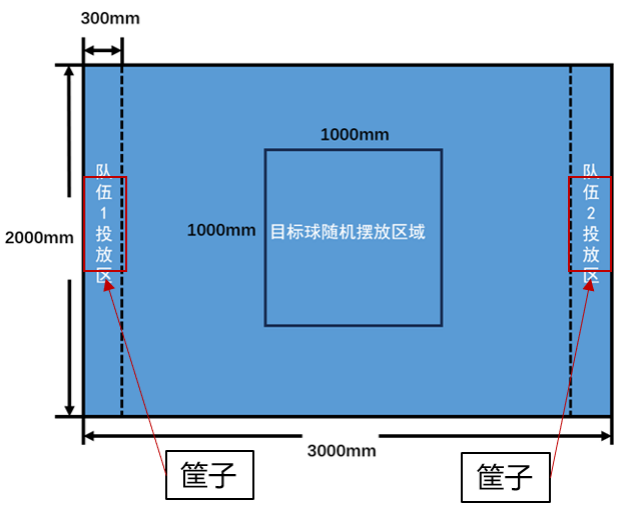
水下打捞任务对抗赛场地图
竞赛场地示意图
- 场地尺寸以及材质
- 场地尺寸:标准水池尺寸为3000mm×2000mm×600mm(长×宽×高),水面高度为500±20mm。
- 场地材质:池底及池壁为湖蓝色防水涂层,模拟真实水下环境。
- 场地布局说明
- 队伍投放区(图中标记区域):机器人必须将抓取到的目标球放入各自队伍的投放区域框子内方可有效。(框子尺寸:450×350×235长×宽×高)
- 目标球随机摆放区域(图中标记区域): 比赛开始前,裁判会将10个球(两种颜色各5个)随机摆放在该区域内。
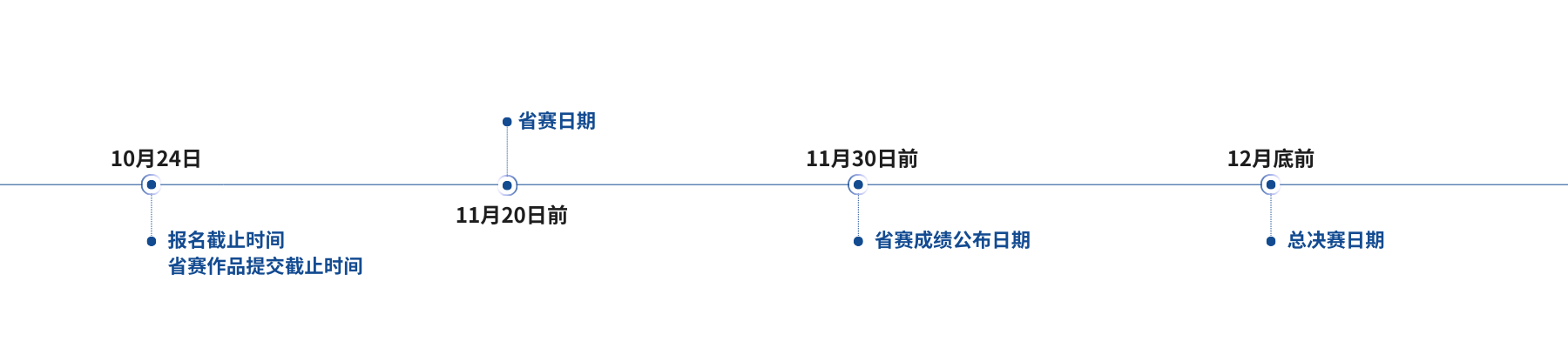
四、比赛流程
(一) 报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
五、评分规则
若省赛评分规则与国赛不同,需提供2份评分表。
评审打分表
| 序号 | 评分项 | 得分 | 备注 | ||
| 1 | 基础任务分 | 每成功夹取并投放1个己方颜色球 | 11 | 共5个球 | |
| 2 | 每成功抢夺并投放1个对手已夹球 | 3 | 共5个球(需己方球已全部夹完) | ||
| 3 | 技术装备分 | 实现实时高清图像回传 | 10 | 需稳定运行全程 | |
| 4 | 水中姿态稳定 | 10 | |||
| 5 | 抓取机构创新设计 | 10 | 需裁判评定 | ||
| 6 | 故意碰撞 | -2 | 1次 | ||
| 总分 | 100 | ||||
六、联系方式
赛项负责人手机号码:18014856649 邮箱:1257218614@qq.com
赛项交流QQ群:909973412
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们