赛题背景
具身智能作为人工智能发展的前沿方向,是进入爆发期的万亿级潜在市场,但同时,产业发展面临技术落地的瓶颈,规划不清、认知受限、多模态融合等痛点问题有待解决,从而催生出在算法应用方面的大量技术创新需求。本赛题重点面向现代工业与服务业中的自动化车辆(AGV/AMR)、仓储拣选机器人、智慧园区巡检车、无人配送车以及智能家居服务等大量应用场景,着重解决如何在复杂的拓扑网络中高效、可靠地完成从“起点”到“终点”的作业任务的问题。即一方面要根据实时环境与调度需求快速选路、优化路径,另一方面又要在动态障碍与规则约束下保持稳定运行。本赛题将此类真实场景简化为一个单起点、单终点的有向无环图(DAG)赛道,通过“分叉—汇合—避障—规则遵守—奖励获取”五大环节,模拟工业厂区货物输送、仓库巷道拣选和园区巡检中的核心技术流程。
参赛者需在这一“微缩”赛道中,运用图论算法进行路径规划,通过计算机视觉识别地标与障碍,并利用激光雷达与深度相机实现环境感知,最终凭借实时控制与动态决策完成安全、高效的行驶与避让。虽然赛道规模与车辆平台经过简化,但其设计精准聚焦了感知、规划与决策三大关键能力,为相关算法与软硬件在仓储物流、智能制造、智慧园区巡检以及家居智能服务等多元化应用场景中,提供了可行的小规模验证与优化平台。
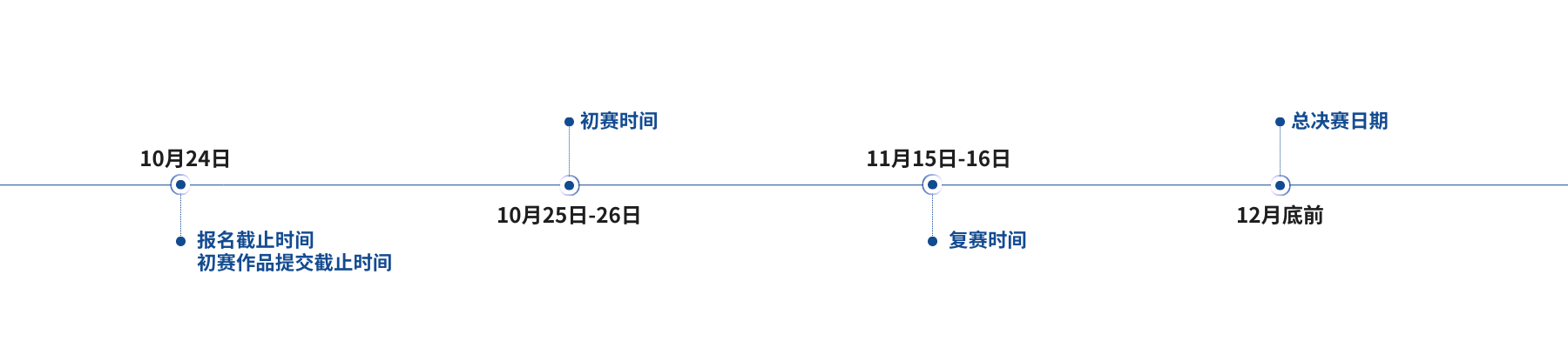
比赛形式
本比赛采用“初赛-复赛-全国总决赛”三级赛制,不分赛区,所有参赛作品统一评审。复赛等同省级赛事,复赛一、二等奖获奖作品推荐参加全国总决赛。
联系方式
赛题负责人联系方式:胥老师,18680751130
联系邮箱:xuchenghong@isauto.ac.cn
赛题交流QQ群:735932493
赛题通知:https://www.aicomp.cn/notice/1964.html
赛程安排调整通知:https://www.aicomp.cn/notice/notice-1/2333.html
赛题规则:智能车视觉规划赛规则0917
 2025精彩瞬间
2025精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们