
 一、赛题背景
一、赛题背景
聚焦机器人智能控制领域,开展机器人定位、导航、视觉识别、人机交互等相关技术研究,不仅可以锻炼学生的综合创新实践能力,同时有助于提高其智能机器人控制、传感、驱动等各方面技术水平,赛项技术涵盖的专业知识及技能包括:自动控制、单片机编程、数字电路、伺服电机驱动、机器人操作系统、C\C++\Python编程、传感器技术、激光SLAM、深度学习、人机交互等。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)参赛(机器人)要求
参赛机器人需满足下面要求,可以自制,自制平台需在省级比赛(预选赛)报名截止前一周内与赛项负责人确认是否满足参赛要求,没有经过书面确认的机器人不能参赛,也可以咨询赛项负责人使用推荐机器人平台。(机器人需具备抗干扰能力,可在室内或室外等强光、强干扰的场地中运行,机器人不允许搭载GPS、RTK、UWB)等定位技术。
| 项 目 | 参数 |
| 整机重量 | 2.5KG |
| 起飞重量 | 最大起飞重量不低于4.5kg |
| 运动性能 | 室外最大飞行速度12m/s,室内最大飞行速度0.5m/s |
| 驱动方式 | 四旋翼独立驱动 |
| 尺 寸 | 四个旋翼轴距不低于450mm |
| 机械结构 | 模块化结构设计,可扩展性强,核心部件保护性强,输入输出设备拆装方便 |
| 材 质 | 碳纤机架 |
| 人工智能控制器 | 控制器不低于6核1.5Ghz,不低于32个TensorCore,GPU不低于1024核,人工智能算力不低于40TOPS,8G+128G。 |
| 电控系统 | 处理器:STM32H743 32 位 Arm Cortex-M7、480MHz、2MB 内存、1MB SRAM IO 处理器:STM32F103 32位Arm Cortex-M3,72MHz,64KB SRAM传感器: 配备加速度计/陀螺仪: ICM-42688-P加速度计/陀螺仪: BMI055磁力计:IST8310气压计MS5611额定电压:最大输入电压:6V USB 电源输入:4.75~5.25V,伺服轨输入:0~36V 16 个PWM 伺服输出,3个通用串行端口,2个GPS 端口,1个 I2c端口,2条CAN 总线,1调试端口,1个电源输入端口。 |
| 通讯方式 | RS-232、USB、CAN、蓝牙、WIFI |
| 电机控制 | Dshot、PWM |
| 电机驱动 | 具备四路直流无刷驱动、四路直流伺服驱动,单个驱动电流最大可达50A,实时反馈电机编码器、电流、力矩等数据 |
| 电 机 | 高性能45A 四合一电调 |
| 轮子/桨叶 | 不少于四个直径为80mm麦克纳姆轮 不少于四对桨叶(两套) |
| 传 感 器 | 激光雷达:尺寸65*65*60mm,重量不低于260g,防护等级IP67,量程不低于40m,角度误差小于0.15°,点云输出不低于200,000点/s,工作电压:9-27V DC。激光波长不低于905nm,通讯方式:以太网。深度视觉传感器:深度范围:0.25-2.5m,精度±5mm,分辨率不低于1920*1080@30fps,功耗不大于2.2W。(3)、视觉传感器:1080P高清摄像机,帧率可达120帧/秒,视角:120° |
| 动力系统 | 4S 8000mah航模锂电池,配备电压检测及低压报警模块,续航能力地面模式不低于3小时 |
| 扩展能力 | 4路USB 、1路DP接口, 1路802.11a/g网口、3路RS232,2路12位精度AD采集接口、2路I/O接口、1路PWM控制接口、1路microUSB |
| 执行器 | 长距离点状激光聚焦模块:尺寸不大于Φ12X45mm |
1. 参赛队赛前需将参赛机器人技术参数发送到下方联系邮箱进行参赛平台认证,经认证后会统一发送认证通过说明文件,通过认证的参赛队才可进入到赛前检录环节。(机器人平台认证方式:将机器人尺寸测量及机器人照片和机器人详细硬件介绍(包含硬件电路图原理图及相关软件等)以word的形式统一发送到邮箱即可(需在邮件内容中体现队长及队员姓名,学校,参赛队名称,所报名赛项))
2. 在满足规则的前提下,可以对机器人的机械和传感器进行
3. 扩展,所用的扩展传感器须经赛项负责人认证,或者由用户完全自主自制的传感器,未经组委会认证的,将取消比赛资格。
4. 任何一台参加比赛的机器人都必须安全操作,即不对人和环境造成危害。每台机器人都要将电源开关设立在外壳上容易接近的地方。裁判认定参赛机器人有安全隐患,经警示仍不修改的队伍,裁判有权取消参赛资格。
(二)比赛场景综述
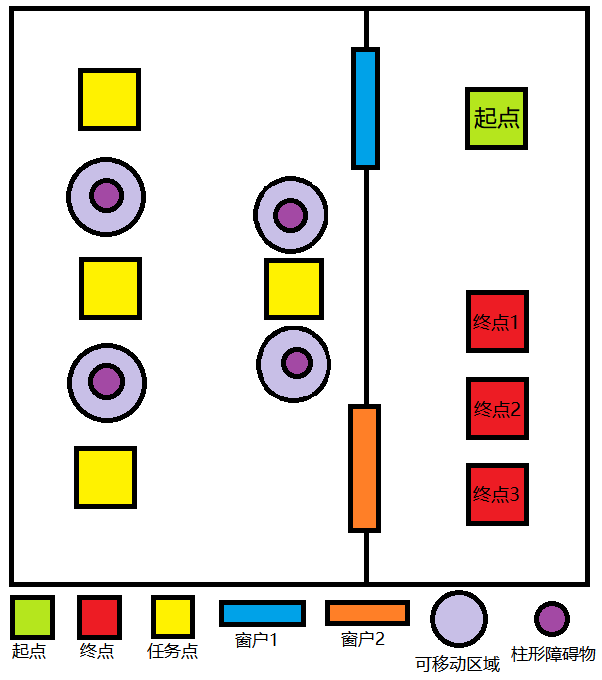
1. 比赛场地为长宽高 5m*5m*2m。
2. 场地设置起点、终点区域,尺寸为 40*40cm。
3. 比赛场地会中设置 一共4个任务点,每个任务点为35*35cm的正方形(任务点中会贴有识别标识),每个任务点中间有直径20cm的圆柱体障碍物隔离,障碍物高度不得低于1.2m最高不超过2m。场地中设置两个宽高1m*0.75m的窗户,窗户内径下沿离地高度为0.4m。
4. 柱形障碍物会在可移动区域内随机摆放,任务点中间躲避障碍物需要进行自主导航避障,禁止提前编写飞行路线,一经发现按作弊处理,取消比赛资格。
5. 任务信息图像及任务点识别图像在比赛现场公布。灯光定位时长不得超过3秒,飞行高度不得低于80cm,灯光需要稳定照射到图像中心点得满分,照射到边缘酌情给分,如出现照射灯光时乱晃,则按照最低分处理。
6. 比赛过程中,所有参赛人员需站在场地围栏外,除紧急处理情况下的裁判员其余所有人员禁止进入正在比赛中的场地。
(三)任务规则与得分标准
⑴ 穿过窗户1 (20)
⑵ 识别到第一个目标并进行灯光定位 (10)
⑶ 识别到第二个目标并进行灯光定位 (10)
⑷ 识别到第三个目标并进行灯光定位 (10)
⑸ 识别到第四个目标并进行灯光定位 (10)
⑹ 穿过窗户2 (20)
⑺ 识别到正确的终点并进行灯光定位 (10)
⑻ 降落在正确的终点区域 (10)
⑼ 技术文档或现场答辩 (10)
注:若提交技术文档,重复率超过50%的队伍,不参与一二等奖评审,若以答辩形式,答辩分不足3分不参与一二等奖评选。
机器人到达目标点或终点,如未完全进入任务点内,裁判根据实际情况酌情给分,在比赛时每支队伍有两次比赛机会,取两次最高分进入最终成绩评审。
l 如果出现 2 个或 2 个以上的多队同分现象,则根据比赛终止前的比赛用时来确定排名,用时较少的队伍排名靠前。比赛过程中参赛队可以主动要求放弃比赛来获得较短的比赛终止时间。
(四)比赛流程
1. 赛前准备
参赛队伍在赛前抽取比赛顺序
每只参赛队比赛前有2分钟准备时间,准备好后将机器人放至出发区域并示意裁判比赛,裁判确认比赛开始后,参赛队启动机器人。
2. 比赛过程
机器人进入场地后,需要在出发区起飞依次穿越窗户1、分别导航到4个任务点进行识别,识别出正确的任务点并进行灯光提示,躲避柱形障碍物到达窗户2附近,穿越窗户2进入终点区域,选择与自己队伍任务要求相同的终点进入。进入终点时,机器人在地面投影完全进入终点便算到达,到达终点着地后比赛结束。
3. 比赛结束
机器人在比赛过程中触碰到围挡或者机器人完全进入“终点”区域,比赛结束。裁判宣布比赛开始后机器人30s未开始运动比赛结束。比赛过程中,机器人触碰到障碍物,比赛结束。比赛过程中,参赛队员举手示意结束比赛时,比赛结束。机器人运行过程中,参赛队员进入场地时,比赛结束。
比赛过程中裁判组(超过两个裁判)有权根据机器人运行状态停止比赛(例如:机器人程序死机、机器人超过30s状态未发生变化)。
四、比赛流程
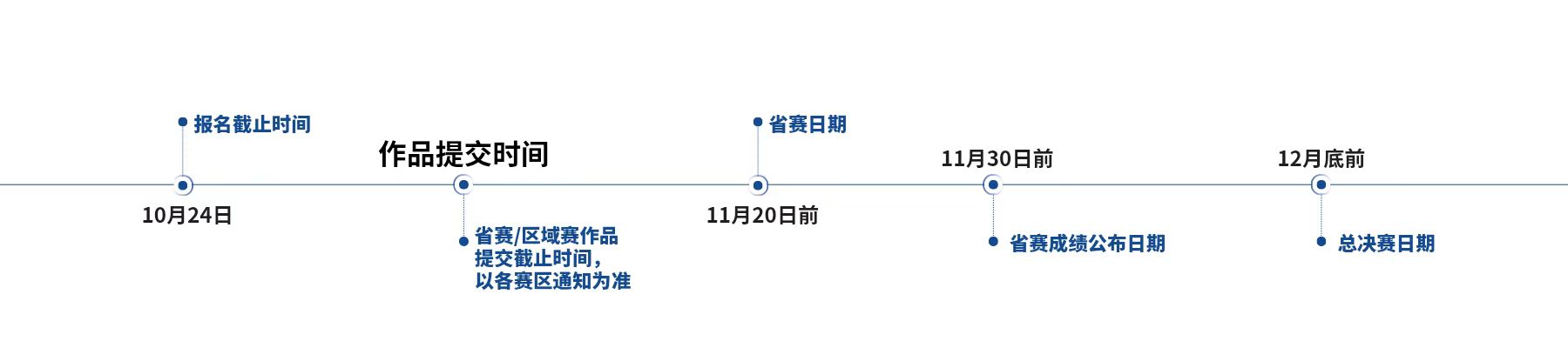
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn。
所有参加队报名前,队长务必加入Q群,如因未加群导致信息发布不对等,后果自负。
省赛和国赛会通过赛前会议发布通知,所有参赛成员需关注B站官方账号:https://b23.tv/4Jl9xwL,我们将在此账号下进行赛前会议直播。
(二)作品提交要求
1. 省赛(区域赛)
关注赛前会议。
2. 总决赛
关注赛前会议。
五、评分规则
评审打分表
| 序号 | 评分项 | 得分 | |
| 1 | 穿过窗户1(20) | ||
| 2 | 识别到第一个目标并进行灯光定位(10) | ||
| 3 | 识别到第二个目标并进行灯光定位(10) | ||
| 4 | 识别到第三个目标并进行灯光定位(10) | ||
| 5 | 识别到第四个目标并进行灯光定位(10) | ||
| 6 | 穿过窗户2(20) | ||
| 7 | 识别到正确的终点并进行灯光定位(10) | ||
| 8 | 降落在正确的终点区域(10) | ||
| 9 | 技术文档或现场答辩 (10) | ||
| 时间 | |||
| 总分 | |||
六、其他说明
参赛队伍务必加入下方QQ群。
七、联系方式
赛项负责人:姚老师
手机号码:17613634782
邮箱:damnbaofan@sina.com
赛项交流QQ群:928497160
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们