
 一、赛题背景
一、赛题背景
聚焦机器人智能控制领域,开展机器人定位、导航、视觉识别、人机交互等相关技术研究,不仅可以锻炼学生的综合创新实践能力,同时有助于提高其智能机器人控制、传感、驱动等各方面技术水平,赛项技术涵盖的专业知识及技能包括:自动控制、单片机编程、数字电路、伺服电机驱动、机器人操作系统、C\C++\Python编程、传感器技术、激光SLAM、深度学习、人机交互等。
二、比赛形式
报名结束后,根据报名情况确定比赛形式,具体以组委会文件通知为准。
三、比赛规则
(一)参赛(机器人)要求
参赛机器人需满足附表要求,可以自制,自制平台需在省级比赛(预选赛)报名截止前一周内与赛项负责人确认是否满足参赛要求,没有经过书面确认的机器人不能参赛,也可以咨询赛项负责人使用推荐机器人平台。
| 项 目 | 参数 |
| 整机重量 | 8KG |
| 负 载 | >10KG |
| 运动性能 | 全向运动最高速度:1m/s;越障:30mm(垂直) |
| 驱动方式 | 四轮独立驱动 |
| 尺 寸 | 370mm*345mm*570mm(长*宽*高) |
| 机械结构 | 模块化结构设计,可扩展性强,核心部件保护性强,输入输出设备拆装方便 |
| 材 质 | 高强度航空铝合金材质骨架+外壳,黑色阳极氧化处理 |
| 电控系统 | 分布式控制系统,双控制核心,主控制器主频不低于双核2.5GHz,图像处理频率不低于700MHz;运动控制系统采用ARM架构,4路高精度伺服控制,搭配九轴IMU模块(三轴陀螺仪+三轴加速度+三轴磁场),总线通讯 |
| 主控制器 | CPU:Intel 双核2.5GHz;内存:DDR4-2400 4GB;存储:128GB SSD;WIFI;蓝牙 |
| 通讯方式 | RS-232、USB、CAN、蓝牙、WIFI |
| 电机控制 | 矢量控制、PWM |
| 电机驱动 | 实时反馈电机编码器、电流、力矩等数据,编码器反馈精度可达12位;单路驱动功率可达100W |
| 电 机 | 四个工业级直流有刷伺服电机,配备编码器,倍频后可达3960线/圈 |
| 轮 子 | 四个直径为97mm麦克纳姆轮,前后轴距不低于24cm |
| 传 感 器 | 激光雷达:360°扫描,测距范围:0.15-12m,测距分辨率:0,5mm,频率8000Hz
视觉传感器:1080P高清摄像机,帧率可达120帧/秒,视角:120° 九轴IMU模块(三轴陀螺仪+三轴加速度+三轴磁场),航向角(YAW )±180°;横滚角( ROLL ) ±180°;俯仰角(PITCH) ±180° 编码器,倍频后可达3960线/圈 |
| 动力系统 | 12V15Ah动力锂电池组,采用进口电芯,具备过充、过放、过流、短路保护,支持最大放电能力150W,配备电压显示模块及低压报警模块,续航能力不低于3小时 |
| 扩展能力 | 4路USB 、2路HDMI、 1路802.11a/g网口(内置无线网卡)、1路RS232,2路12位精度AD采集接口、2路I/O接口、1路PWM控制接口、1路microUSB口 |
| 显示器 | 10.1寸高清显示器,全视角iPS屏 |
| 射击模块 | 高速电机:8.4v 7200rpm
电源系统:8.4v 4400mAh 电量显示:8.4v电量显示模块 |
1. 参赛队赛前需将参赛机器人技术参数发送到下方联系邮箱进行参赛平台认证,经认证后会统一发送认证通过说明文件,通过认证的参赛队才可进入到赛前检录环节。(机器人平台认证方式:将机器人尺寸测量及机器人照片和机器人详细硬件介绍以word的形式统一发送到邮箱即可(需在邮件内容中体现队长及队员姓名,学校,参赛队名称,所报名赛项))
2. 在满足规则的前提下,可以对机器人的机械和传感器进行扩展,所用的扩展传感器须经赛项负责人认证,或者由用户完全自主自制的传感器,未经组委会认证的,将取消比赛资格。
3. 任何一台参加比赛的机器人都必须安全操作,即不对人和环境造成危害。每台机器人都要将电源开关设立在外壳上容易接近的地方。裁判认定参赛机器人有安全隐患,经警示仍不修改的队伍,裁判有权取消参赛资格。
(二)比赛场景综述
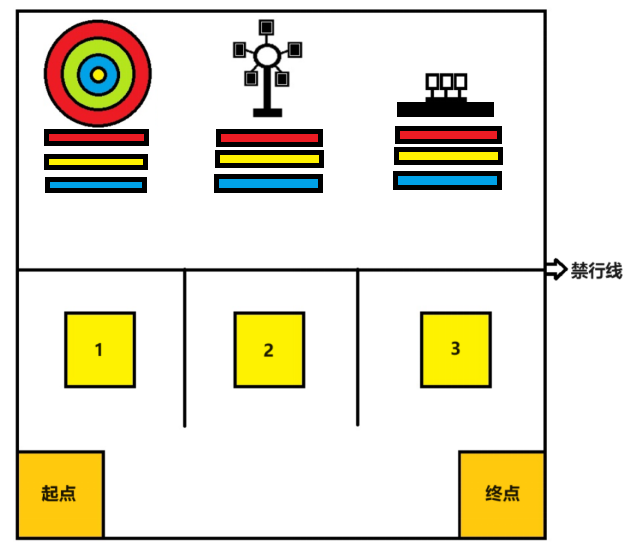
1. 比赛场地为 3.6m*3.6m,场地四周架设高为 30cm 的围栏。
2. 场地设置起点、终点区域各一个,尺寸均为 40cm*40cm。
3. 比赛场地会中设置 1-3 共三个任务点和相对位置的三个标靶,每个任务点为40cm*35cm的长方形,标靶摆放位置为三个可选项,蓝色距离任务点1m,黄色距离任务点1.2m,红色距离任务点1.4m,标靶中心高度离地 26cm,每个任务点中间由长120cm 高30cm 的挡板隔离。分别到达 1-3 任务点,并且在该任务点射击正前方的任务标靶,其中1号点位前面的标靶为环形计分靶,蓝色位置系数乘1,黄色位置系数乘2,红色位置系数乘3(例如:黄色位置打中10环,既得10*2=20分)。2号点位前面的标靶为旋转靶蓝色位置得8分,黄色位置得14分,红色位置得20分。3号点位前面的标靶为移动靶,蓝色位置得8分,黄色位置得14分,红色位置得20分。
4. 标靶尺寸为正方形,标靶图像在比赛现场发布。
5. 比赛过程中,所有参赛人员需站在场地围栏外,除紧急处理情况下的裁判员其余所有人员禁止进入正在比赛中的场地。
(三)任务规则与得分标准
(1)到达任务点1 (10)
(2)击中1前方环形标靶 (10/20/30)
(3)到达任务点2 (10)
(4)击倒2前方的任务标靶 (8/14/20)
(5)到达任务点3 (10)
(6)击倒3前方的任务标靶 (8/14/20)
(7)到达终点区域 (10)
(8)技术文档或技术答辩 (10)
注:若提交技术文档,重复率超过50%的队伍,不参与一二等奖评审,若以答辩形式,答辩分不足3分不参与一二等奖评选。
机器人到达任务点或终点,如未完全进入任务点内,裁判根据实际情况酌情给分,在比赛时每支队伍有两次比赛机会,取两次最高分进入最终成绩评审。
比赛开始前必须选择各个靶位摆放位置。
如果出现 2 个或 2 个以上的多队同分现象,则根据比赛终止前的比赛用时来确定排名,用时较少的队伍排名靠前。比赛过程中参 赛队可以主动要求放弃比赛来获得较短的比赛终止时间。
(四)比赛流程
1. 赛前准备
每只参赛队比赛前有2分钟准备时间,准备好后将机器人放至出发区域并示意裁判比赛,裁判确认比赛开始后,参赛队启动机器人。
2. 比赛过程
比赛开始后,机器人从起点出发,需要进入每个任务点,机器人在地面投影完全进入任务点便算到达,到达任务点后,自行瞄准射击,在瞄准射击过程中不可离开任务点,不可越过禁行线。
3. 比赛结束
每场比赛发生以下情况之一,则比赛结束:
(1)参赛队员举手示意结束比赛时,比赛结束。
(2)机器人完全进入“终点”区域,比赛结束。
(3)机器人在比赛过程中触碰到围挡,比赛结束。
(4)裁判宣布比赛开始后机器人30s未开始运动比赛结束。
(5)机器人运行过程中,参赛队员进入场地时,比赛结束。
(6)比赛过程中裁判组有权根据机器人运行状态宣布比赛结束。(例如:机器人程序死机、机器人超过30s状态未发生变化)。
四、比赛流程
(一)报名
大赛采用线上平台报名方式,报名官网:www.aicomp.cn
所有参加队报名前,队长务必加入QQ群,如因未加群导致信息发布不对等,后果自负。
省赛和国赛会通过赛前会议发布通知,所有参赛成员需关注B站官方账号:https://b23.tv/4Jl9xwL,我们将在此账号下进行赛前会议直播。
(二)作品提交要求
1. 省赛(区域赛)
关注赛前会议。
2. 总决赛
关注赛前会议。
五、评分规则
评审打分表
| 序号 | 评分项 | 得分 | |
| 1 | 到达任务点1(10) | ||
| 2 | 击中1前方环形标靶(10/20/30) | ||
| 3 | 到达任务点2(10) | ||
| 4 | 击倒2前方的任务标靶(8/14/20) | ||
| 5 | 到达任务点3 (10) | ||
| 6 | 击倒3前方的任务标靶(8/14/20) | ||
| 7 | 到达终点区域(10) | ||
| 8 | 技术文档或现场答辩(10) | ||
| 时间 | |||
| 总分 | |||
六、联系方式
赛项负责人:刘老师
手机号码:13954896856
邮箱:13954896856@163.com
赛项交流QQ群:834018576
 2024精彩瞬间
2024精彩瞬间
 大赛回顾
大赛回顾
 关注我们
关注我们